單片機解析GPS數據算法

硬件平臺:XC-GPS開發板+XC-STC單片機開發板
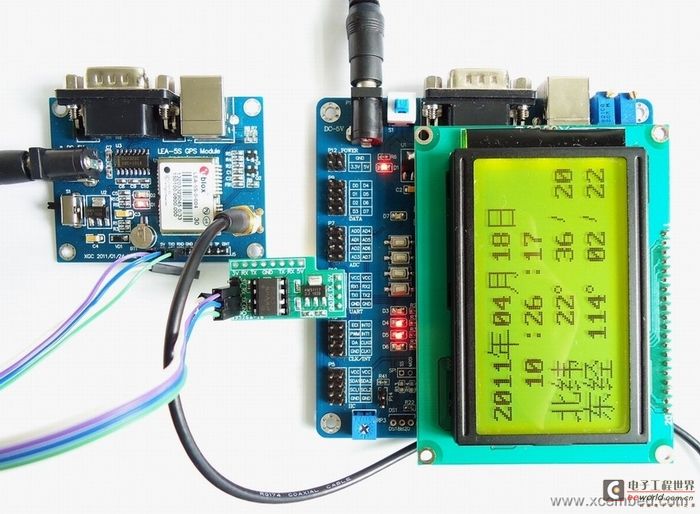
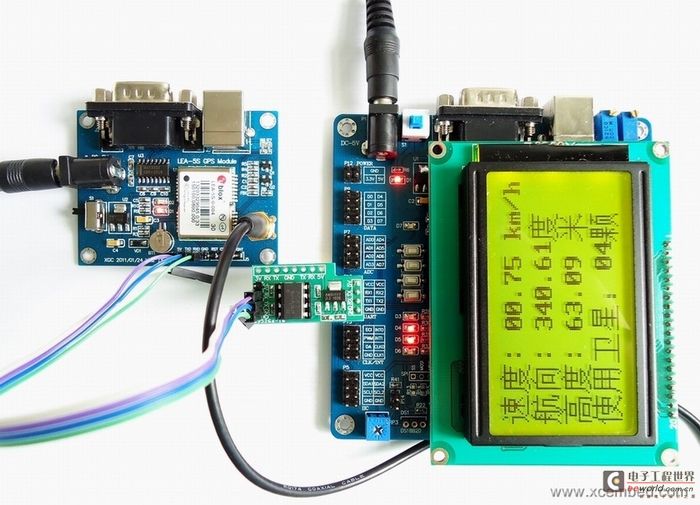
效果如下:
首先創建一個GPS數據結構體:
- typedef data struct{
double latitude; //經度 double longitude; //緯度 int latitude_Degree; //度 int latitude_Cent; //分 int latitude_Second; //秒 int longitude_Degree; //度 int longitude_Cent; //分 int longitude_Second; //秒 float speed; //速度 float direction; //航向 float height; //海拔高度 int satellite; U8 NS; U8 EW; DATE_TIME D; - }GPS_INFO;
時間結構體:
- typedef struct{
int year; int month; int day; int hour; int minute; int second; - }DATE_TIME;
核心算法就是解析GPRMC數據,得到經緯度,日期時間,速度,航向:
- int
GPS_RMC_Parse(char *line, GPS_INFO *GPS) - {
U8 ch, status, tmp; float lati_cent_tmp, lati_second_tmp; float long_cent_tmp, long_second_tmp; float speed_tmp; char *buf = line; ch = buf[5]; status = buf[GetComma(2, buf)]; if (ch == C) //如果第五個字符是C,($GPRMC) { if (status == A) //如果數據有效,則分析 { GPS->NS = buf[GetComma(4, buf)]; GPS->EW = buf[GetComma(6, buf)]; GPS->latitude = Get_Double_Number(&buf[GetComma(3, buf)]); GPS->longitude = Get_Double_Number(&buf[GetComma(5, buf)]); GPS->latitude_Degree = (int)GPS->latitude / 100; //分離緯度 lati_cent_tmp = (GPS->latitude - GPS->latitude_Degree * 100); GPS->latitude_Cent = (int)lati_cent_tmp; lati_second_tmp = (lati_cent_tmp - GPS->latitude_Cent) * 60; GPS->latitude_Second = (int)lati_second_tmp; GPS->longitude_Degree = (int)GPS->longitude / 100; //分離經度 long_cent_tmp = (GPS->longitude - GPS->longitude_Degree * 100); GPS->longitude_Cent = (int)long_cent_tmp; long_second_tmp = (long_cent_tmp - GPS->longitude_Cent) * 60; GPS->longitude_Second = (int)long_second_tmp; speed_tmp = Get_Float_Number(&buf[GetComma(7, buf)]); //速度(單位:海里/時) GPS->speed = speed_tmp * 1.85; //1海里=1.85公里 GPS->direction = Get_Float_Number(&buf[GetComma(8, buf)]); //角度 GPS->D.hour = (buf[7] - 0) * 10 + (buf[8] - 0); //時間 GPS->D.minute = (buf[9] - 0) * 10 + (buf[10] - 0); GPS->D.second = (buf[11] - 0) * 10 + (buf[12] - 0); tmp = GetComma(9, buf); GPS->D.day = (buf[tmp + 0] - 0) * 10 + (buf[tmp + 1] - 0); //日期 GPS->D.month = (buf[tmp + 2] - 0) * 10 + (buf[tmp + 3] - 0); GPS->D.year = (buf[tmp + 4] - 0) * 10 + (buf[tmp + 5] - 0) + 2000; UTC2BTC(&GPS->D); return 1; } } return 0; - }
line是串口接收的一行數據buf
GetComma函數作用是一行數據中第幾個逗號后面那個字符在這行數據中的位置
Get_Double_Number函數作用是把給定字符串第一個逗號之前的字符轉化成雙精度型,在這里就是把代表經度和緯度的字符串轉換成數字,同樣的函數還有Get_Float_Number
UTC2BTC函數是將世界時間轉換成北京時間(相差8小時)
在LCD顯示程序中把GPS_INFO結構體的已經被賦值的變量顯示到屏上相應的位置即可
還有一個GPGGA信息段可以提供海拔高度和衛星數量信息
- int
GPS_GGA_Parse(char *line, GPS_INFO *GPS) - {
U8 ch, status; char *buf = line; ch = buf[4]; status = buf[GetComma(2, buf)]; if (ch == G) //$GPGGA { if (status != ,) { GPS->height = Get_Float_Number(&buf[GetComma(9, buf)]); GPS->satellite = Get_Int_Number(&buf[GetComma(7, buf)]); return 1; } } return 0; - }

評論