史上最強大的車載智能安全行駛儀輕松實現,它都能做些啥

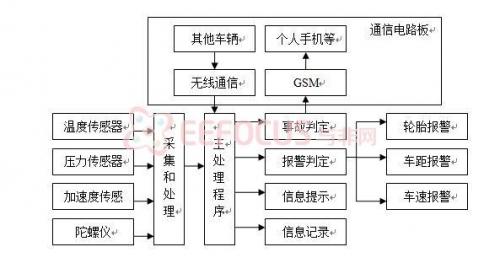
圖1 系統硬件結構框圖
3.2 硬件資源配置
1.附件電路板:通信和存儲電路板:無線接口(車車互聯),GSM(信息上傳),串口(用于調試),CAN(與汽車ECU的通信),存儲器等
2.界面顯示電路板:LCD12864液晶,報警器等
3.主控制板:基于微控制器芯片STM32F103RE的電路板
4.傳感器:LSM303DLH6,LY330ALH,LPR430A,數字溫度傳感器ADT7420,壓力傳感器
3.3系統軟件架構
在本系統軟件中,有以下幾個子程序
1.傳感器信號處理:采集角度,加速度,溫度壓力等模擬信號并處理為可應用參數值。
2.讀取其他車輛信息:通過與通信電路板之間的接口讀取檢測到的其他車輛信息。
3.主處理程序,主要包括了輪胎溫度壓力檢測程序,根據路面顛簸情況對車速進行判定的程序,根據其他車輛行駛情況對車距判定的程序,根據車輛轉彎角度等情況對轉彎操作進行判定的程序以及車輛是否發生事故的判定程序。如果超過預設的判定值作出相應的處理。
4.事故發生應急程序:若判定事故發生主動報警,按下報警鍵也觸發次程序。
5.提示信息:采集和處理后的重要數據均可顯示,以及對駕駛員操作的提示。
6.報警信息:判定程序作出報警判定后進行語音提示報警或蜂鳴器報警燈。
7.信息記錄:記錄近期詳細行駛信息,另外對數據進行處理保證長時間記錄。
各子程序之間關系如圖所示
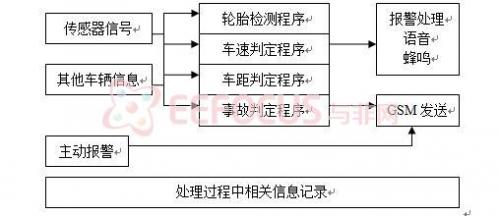
圖2 系統軟件架構
3.4 系統軟件流程
系統上電后,初始化設置各寄存器以及用戶變量,然后等待進入中斷程序。
系統程序主要包括三個定時程序,第一個定時程序將讀取傳感器信號值和其他車輛信息值,之后對數據進行處理,結果保存到自定義的變量。第二個定時程序是主處理程序,根據變量值進行各種判定。如果判定成功,直接執行相應動作程序。第三個定時程序是數據記錄和顯示,用于屏幕界面的刷新顯示,數據的定時記錄和更新。
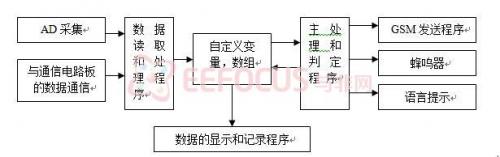
圖3 系統軟件流程

評論