基于STM32的CAN通訊實驗

30.1 CAN簡介
30.2 硬件設計
30.3 軟件設計
30.4 下載驗證
30.1 CAN簡介
CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國際標準化的串行通信協議。在當前的汽車產業中,出于對安全性、舒適性、方便性、低公害、低成本的要求,各種各樣的電子控制系統被開發了出來。由于這些系統之間通信所用的數據類型及對可靠性的要求不盡相同,由多條總線構成的情況很多,線束的數量也隨之增加。為適應“減少線束的數量”、“通過多個LAN,進行大量數據的高速通信”的需要,1986 年德國電氣商博世公司開發出面向汽車的CAN 通信協議。此后,CAN 通過ISO11898 及ISO11519 進行了標準化,現在在歐洲已是汽車網絡的標準協議。
現在,CAN 的高性能和可靠性已被認同,并被廣泛地應用于工業自動化、船舶、醫療設備、工業設備等方面。現場總線是當今自動化領域技術發展的熱點之一,被譽為自動化領域的計算機局域網。它的出現為分布式控制系統實現各節點之間實時、可靠的數據通信提供了強有力的技術支持。
CAN 控制器根據兩根線上的電位差來判斷總線電平。總線電平分為顯性電平和隱性電平,二者必居其一。發送方通過使總線電平發生變化,將消息發送給接收方。
CAN協議具有一下特點:
1)
2)
3)
4)
5)
6)
正是因為CAN協議的這些特點,使得CAN特別適合工業過程監控設備的互連,因此,越來越受到工業界的重視,并已公認為最有前途的現場總線之一。
CAN協議經過ISO標準化后有兩個標準:ISO11898標準和ISO11519-2標準。其中ISO11898是針對通信速率為125Kbps~1Mbps的高速通信標準,而ISO11519-2是針對通信速率為125Kbps以下的低速通信標準。
本章,我們使用的是450Kbps的通信速率,使用的是ISO11898標準,該標準的物理層特征如圖30.1.1所示:
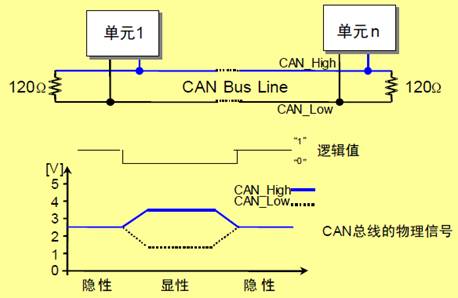
圖30.1.1 ISO11898物理層特性
l
l
l
l
l
另外,數據幀和遙控幀有標準格式和擴展格式兩種格式。標準格式有11 個位的標識符(ID),擴展格式有29 個位的ID。各種幀的用途如表30.1.1所示:
幀類型 | 幀用途 |
數據幀 | 用于發送單元向接收單元傳送數據的幀 |
遙控幀 | 用于接收單元向具有相同 ID 的發送單元請求數據的幀 |
錯誤幀 | 用于當檢測出錯誤時向其它單元通知錯誤的幀 |
過載幀 | 用于接收單元通知其尚未做好接收準備的幀 |
間隔幀 | 用于將數據幀及遙控幀與前面的幀分離開來的幀 |
表30.1.1 CAN協議各種幀及其用途
(1)
(2)
(3)
(4)
(5)
(6)
(7)
數據幀的構成如圖30.1.2所示:

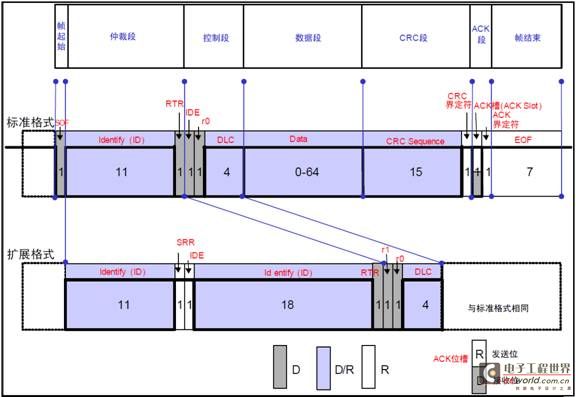
圖30.1.2
圖中D表示顯性電平,R表示隱形電平(下同)。
幀起始,這個比較簡單,標準幀和擴展幀都是由1個位的顯性電平表示幀起始。
仲裁段,表示數據優先級的段,標準幀和擴展幀格式在本段有所區別,如圖30.1.3所示:

圖30.1.3
標準格式的ID 有11 個位。從ID28 到ID18 被依次發送。禁止高7 位都為隱性(禁止設定:ID=1111111XXXX)。擴展格式的 ID 有29 個位。基本ID 從ID28 到ID18,擴展ID 由ID17 到ID0 表示。基本ID 和標準格式的ID 相同。禁止高7 位都為隱性(禁止設定:基本ID=1111111XXXX)。
其中RTR位用于標識是否是遠程幀(0,數據幀;1,遠程幀),IDE位為標識符選擇位(0,使用標準標識符;1,使用擴展標識符),SRR位為代替遠程請求位,為隱性位,它代替了標準幀中的RTR位。
控制段,由6個位構成,表示數據段的字節數。標準幀和擴展幀的控制段稍有不同,如圖30.1.4所示:
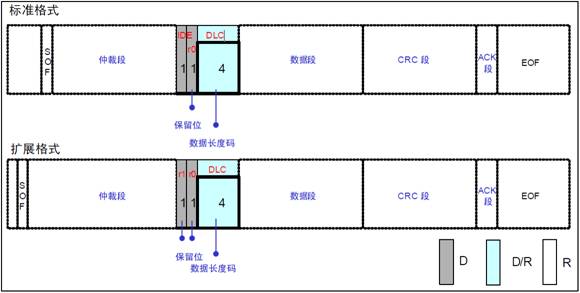
圖30.1.4
數據段,該段可包含0~8個字節的數據。從最高位(MSB)開始輸出,標準幀和擴展幀在這個段的定義都是一樣的。如圖30.1.5所示:
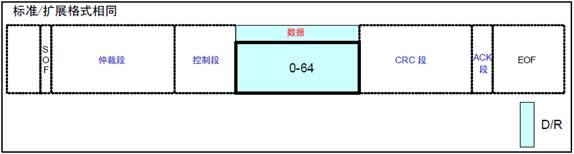
圖30.1.5
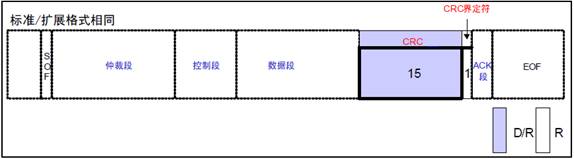
圖30.1.6

圖30.1.7
發送單元的ACK,發送2個位的隱性位,而接收到正確消息的單元在ACK槽(ACK Slot)發送顯性位,通知發送單元正常接收結束,這個過程叫發送ACK/返回ACK。發送 ACK 的是在既不處于總線關閉態也不處于休眠態的所有接收單元中,接收到正常消息的單元(發送單元不發送ACK)。所謂正常消息是指不含填充錯誤、格式錯誤、CRC 錯誤的消息。
幀結束,這個段也比較簡單,標準幀和擴展幀在這個段格式一樣,由7個位的隱性位組成。
由發送單元在非同步的情況下發送的每秒鐘的位數稱為位速率。一個位可分為 4 段。
l
l
l
l
這些段又由可稱為 Time Quantum(以下稱為Tq)的最小時間單位構成。
1 位分為4 個段,每個段又由若干個Tq 構成,這稱為位時序。
1 位由多少個Tq 構成、每個段又由多少個Tq 構成等,可以任意設定位時序。通過設定位時序,多個單元可同時采樣,也可任意設定采樣點。各段的作用和 Tq 數如表30.1.2所示:
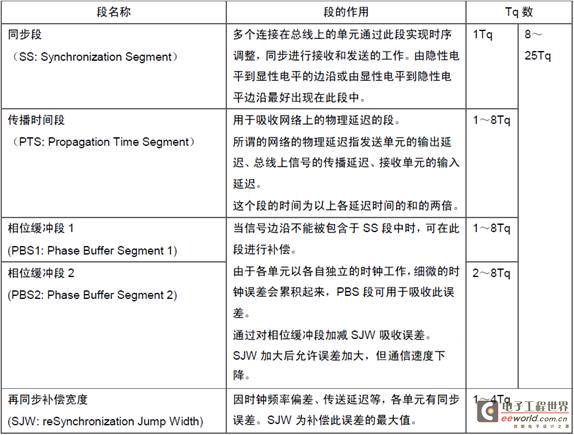
表30.1.2 一個位各段及其作用
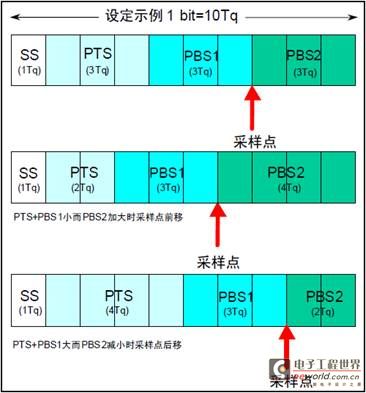
圖30.1.8 一個位的構成
在總線空閑態,最先開始發送消息的單元獲得發送權。
當多個單元同時開始發送時,各發送單元從仲裁段的第一位開始進行仲裁。連續輸出顯性電平最多的單元可繼續發送。實現過程,如圖30.1.9所示:
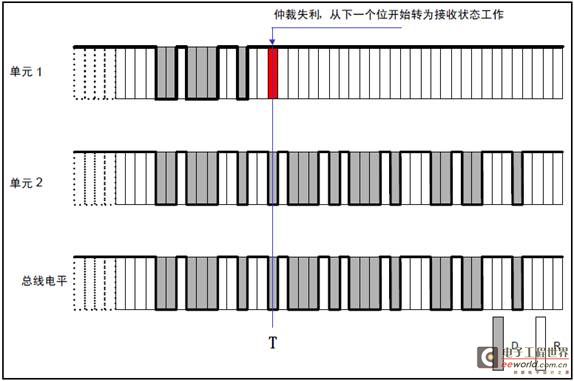
圖30.1.9 CAN總線仲裁過程
STM32的bxCAN的主要特點有:
l
l
l
l
l
l
在STM32互聯型產品中,帶有2個CAN控制器,而我們使用的STM32F103ZET6屬于增強型,不是互聯型,只有1個CAN控制器。雙CAN的框圖如圖30.1.10所示:

圖30.1.10 雙CAN框圖
STM32每個過濾器組的位寬都可以獨立配置,以滿足應用程序的不同需求。根據位寬的不同,每個過濾器組可提供:
● 1個32位過濾器,包括:STDID[10:0]、EXTID[17:0]、IDE和RTR位
● 2個16位過濾器,包括:STDID[10:0]、IDE、RTR和EXTID[17:15]位
此外過濾器可配置為,屏蔽位模式和標識符列表模式。
在屏蔽位模式下,標識符寄存器和屏蔽寄存器一起,指定報文標識符的任何一位,應該按照“必須匹配”或“不用關心”處理。
而在標識符列表模式下,屏蔽寄存器也被當作標識符寄存器用。因此,不是采用一個標識符加一個屏蔽位的方式,而是使用2個標識符寄存器。接收報文標識符的每一位都必須跟過濾器標識符相同。
通過CAN_FMR寄存器,可以配置過濾器組的位寬和工作模式,如圖30.1.11所示:
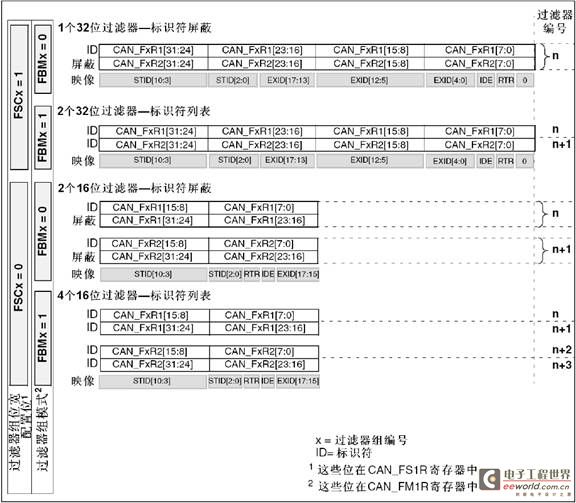
圖30.1.11 過濾器組位寬模式設置
為了過濾出一組標識符,應該設置過濾器組工作在屏蔽位模式。
為了過濾出一個標識符,應該設置過濾器組工作在標識符列表模式。
應用程序不用的過濾器組,應該保持在禁用狀態。
過濾器組中的每個過濾器,都被編號為(叫做過濾器號,圖30.1.11中的n)從0開始,到某個最大數值-取決于過濾器組的模式和位寬的設置。

關鍵詞:
STM32CAN通訊實
評論