紅外遙控系統(tǒng)原理及單片機軟件解碼程序


上圖就是很常見的車載MP3遙控器,比較小巧,很好用。下面是紅外發(fā)射和接受原理:

到此讀者可能會有疑惑,那么不同的調(diào)制解調(diào)方法那么出來的脈沖規(guī)則是不一樣的?是的,的確如此。
遙控發(fā)射器專用芯片很多,根據(jù)編碼格式可以分成兩大類,這里我們以運用比較廣泛,解碼比較容易的一類來加以說明,現(xiàn)以日本NEC的uPD6121G組成發(fā)射電路為例說明編碼原理(一般家庭用的DVD、VCD、音響都使用這種編碼方式)。當發(fā)射器按鍵按下后,即有遙控碼發(fā)出,所按的鍵不同遙控編碼也不同。這種遙控碼具有以下特征:
采用脈寬調(diào)制的串行碼,以脈寬為0.565ms、間隔0.56ms、周期為1.125ms的組合表示二進制的“0”;以脈寬為0.565ms、間隔1.685ms、周期為2.25ms的組合表示二進制的“1”,其波形如圖所示。
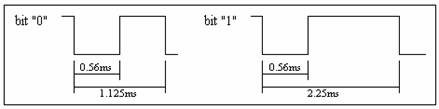
如圖可見,0與1前端的低電平持續(xù)都是0.56ms,那么就是后面的高電平持續(xù)時間不同,0為0.56ms,1為1.685ms,找到不同之處,編程時就有識別的依據(jù)了!
上述“0”和“1”組成的32位二進制碼經(jīng)38kHz的載頻進行二次調(diào)制以提高發(fā)射效率,達到降低電源功耗的目的。然后再通過紅外發(fā)射二極管產(chǎn)生紅外線向空間發(fā)射,如圖所示。

UPD6121G產(chǎn)生的遙控編碼是連續(xù)的32位二進制碼組,其中前16位為用戶識別碼,能區(qū)別不同的電器設(shè)備,防止不同機種遙控碼互相干擾。該芯片的用戶識別碼固定為十六進制01H;后16位為8位操作碼(功能碼)及其反碼。UPD6121G最多額128種不同組合的編碼。
請看下圖,來自網(wǎng)絡(luò):
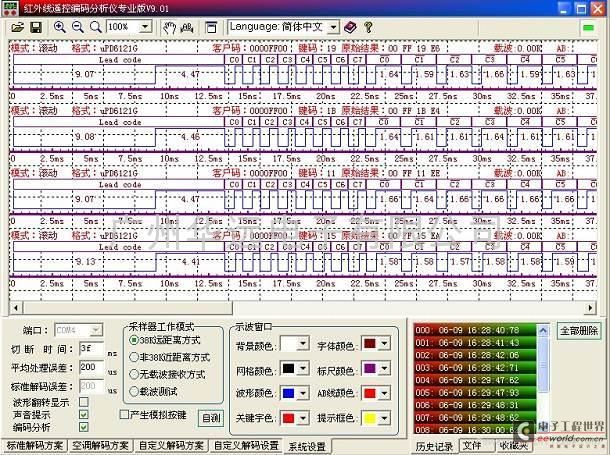
當一個鍵按下超過36ms,振蕩器使芯片激活,將發(fā)射一組108ms的編碼脈沖,這108ms發(fā)射代碼由一個引導碼(9ms),一個結(jié)果碼(4.5ms),低8位地址碼(9ms~18ms),高8位地址碼(9ms~18ms),8位數(shù)據(jù)碼(9ms~18ms)和這8位數(shù)據(jù)的反碼(9ms~18ms)組成。如果鍵按下超過108ms仍未松開,接下來發(fā)射的代碼(連發(fā)碼)將僅由起始碼(9ms)和結(jié)束碼(2.25ms)組成。(實際上人手的動作是很慢的,即使你快速的按下按鍵,可能對于芯片來說還是超過108ms,所以如何處理連發(fā)碼是很關(guān)鍵的)
遙控器在按鍵按下后,周期性地發(fā)出同一種32位二進制碼,周期約為108ms。一組碼本身的持續(xù)時間隨它包含的二進制“0”和“1”的個數(shù)不同而不同,大約在45~63ms之間,圖為發(fā)射波形圖。


下面是我寫的代碼,按鍵編碼通過串口發(fā)送到電腦端:
由于時間關(guān)系,代碼注釋不多。
其中START_Judge()函數(shù)是判斷9ms低電平,既是判斷有無遙控信號。
BOOT_REPEATING_CODE_Judge()是判斷是引導碼還是連發(fā)碼,引導碼則進入接受數(shù)據(jù)環(huán)節(jié),連發(fā)碼表明數(shù)據(jù)已經(jīng)接受結(jié)束。
H_L_LEVEL_Judge()是接受數(shù)據(jù)時判斷高低電平。
如果亂碼,請參考:
http://blog.csdn.net/mhjerry/article/details/6601324
注明:以下代碼為純軟件方式,沒有用到中斷,定時器方式,純CPU查詢,但測試結(jié)果倒也可以,至少比較穩(wěn)定,得到的碼值不管對不對,都是那個值。
- /*------------------------------------------------------------*-
- 紅外收發(fā).C
- ------------------------------------------------------------
- 遙控器測試
- -*------------------------------------------------------------*/
- #include
- //---紅外接收一體化輸出口----------------------------------
- sbitIR_Out=P3^2;
- bitSTART_Flag=0;
- bitBOOT_REPEATING_CODE_Flag=0;
- unsignedcharDATA[4]={0};
- bdataunsignedcharTEMP_BIT;
- sbitB0=TEMP_BIT^0;
- sbitB1=TEMP_BIT^1;
- sbitB2=TEMP_BIT^2;
- sbitB3=TEMP_BIT^3;
- sbitB4=TEMP_BIT^4;
- sbitB5=TEMP_BIT^5;
- sbitB6=TEMP_BIT^6;
- sbitB7=TEMP_BIT^7;
- //---有無遙控信號判斷函數(shù)----------------------------------
- bitSTART_Judge();
- //---連發(fā)碼判斷函數(shù)----------------------------------------
- bitBOOT_REPEATING_CODE_Judge();
- //---"0"和"1"識別------------------------------------------
- bitH_L_LEVEL_Judge();
- //---串口初始化--------------------------------------------
- voidUART_Initial();
- voidDELAY_Us(unsignedintUs)
- {
- unsignedintx;
- for(x=0;x<=(Us/200-1);x++);
- }
- voidDELAY_Ms(unsignedintMs)
- {
- unsignedintx,y;
- for(x=0;x<=(Ms-1);x++)
- {
- for(y=0;y<=120;y++);
- }
- }
- voidmain()
- {
- unsignedchari;
- UART_Initial();
- IR_Out=1;
- while(1)
- {
- START_Flag=START_Judge();
- BOOT_REPEATING_CODE_Flag=BOOT_REPEATING_CODE_Judge();
- if(START_Flag&&!BOOT_REPEATING_CODE_Flag)
- {
- for(i=0;i<4;i++)
- {
- B0=H_L_LEVEL_Judge();
- B1=H_L_LEVEL_Judge();
- B2=H_L_LEVEL_Judge();
- B3=H_L_LEVEL_Judge();
- B4=H_L_LEVEL_Judge();
- B5=H_L_LEVEL_Judge();
- B6=H_L_LEVEL_Judge();
- B7=H_L_LEVEL_Judge();
- DATA[i]=TEMP_BIT;
- }
- for(i=0;i<4;i++)
- {
- SBUF=DATA[i];
- while(TI==0);
- TI=0;
- }
- }
- }
- }
- voidUART_Initial()
- {
- SCON=0x50;//SCON:模式1,8-bitUART,使能接收
- TMOD|=0x20;//TMOD:timer1,mode2,8-bitreload
- TH1=0xFD;//TH1:reloadvaluefor9600baud@
- //11.0592MHz
- TR1=1;//TR1:timer1run
- EA=0;//關(guān)閉總中斷
- ES=0;//關(guān)閉串口中斷
- }
- bitSTART_Judge()
- {
- bitTEMP_Flag=1;
- unsignedchari=0;
- //在正常無遙控信號時,一體化紅外接收頭輸出是高電平,程序一直在循環(huán)。
- while(IR_Out==1);
- //重復10次,目的是檢測在6876~8352微秒內(nèi)如果出現(xiàn)高電平就退出解碼程序
- for(i=0;i<9;i++)
- {
- DELAY_Us(800);//測試實際延時約為764~928us
- if(IR_Out==1)
- {
- TEMP_Flag=0;
- break;
- }
- }
- returnTEMP_Flag;
- }
- bitBOOT_REPEATING_CODE_Judge()
- {
- bitTEMP_Flag=1;
- while(IR_Out==0);//等待高電平避開9毫秒低電平引導脈沖
- DELAY_Ms(1);//測試實際延時約為1.007ms
- DELAY_Ms(1);//測試實際延時約為1.007ms
- DELAY_Us(200);//0.086ms
- DELAY_Us(200);//0.086ms
- DELAY_Us(200);//0.086ms
- //共計2.272ms
- if(IR_Out==0)
- {
- TEMP_Flag=1;//是連發(fā)碼
- }
- else
- {
- TEMP_Flag=0;//不是連發(fā)碼,而是引導碼
- }
- returnTEMP_Flag;
- }
- bitH_L_LEVEL_Judge()
- {
- while(IR_Out==0);//等待地址碼第一位的高電平信號
- DELAY_Us(800);//測試實際延時約為764~928us
- if(IR_Out==1)
- {
- DELAY_Ms(1);//測試實際延時約為1.007ms
- return1;
- }
- else
- {
- return0;
- }
- }
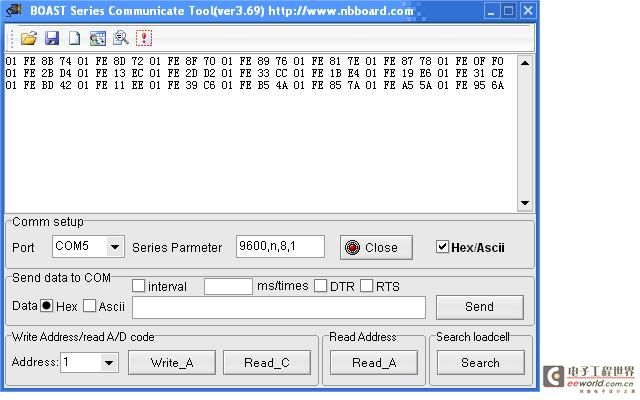
編輯如下:
01 FE 8B 74 --- 01 FE 8D 72 --- 01 FE 8F 70
01 FE 89 76 --- 01 FE 81 7E --- 01 FE 87 78
01 FE 0F F0 --- 01 FE 2B D4 --- 01 FE 13 EC
01 FE 2D D2 --- 01 FE 33 CC --- 01 FE 1B E4
01 FE 19 E6 --- 01 FE 31 CE --- 01 FE BD 42
01 FE 11 EE --- 01 FE 39 C6 --- 01 FE B5 4A
以上為對應(yīng)按鍵的編碼。
過程中存在問題:
一是如何有效的識別引導碼和連發(fā)碼,因為這個能直接影響到長時間按鍵,單片機的響應(yīng)與否。這個問題,貌似我以解決,就是長時間按鍵后,單片機識別一次按鍵后,如果還是同一按鍵,就不與理睬。
還有一個問題就是,如果連續(xù)按下兩次按鍵,該程序能夠識別出,但是如果間隔很短,第二下按鍵的編碼容易出錯,容易變成這樣:
03 FE 8B 74.。。。就是第一個字節(jié)出現(xiàn)誤差,這個問題現(xiàn)在還未來得及解決。
還有就是本程序?qū)τ谘訒r函數(shù)的精度要求很高,因為本身處理的脈沖就是MS級別的。所以需要嚴格的測試延時函數(shù)的實際延時時間:
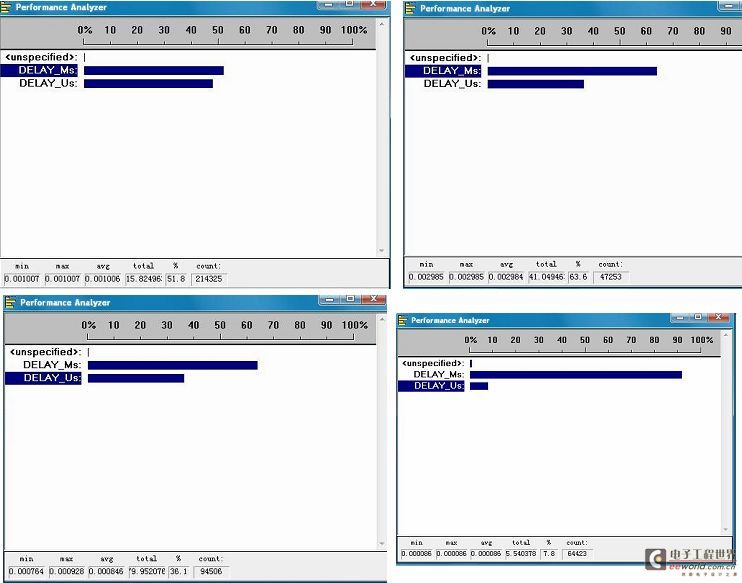
以上的代碼,可以看出許多問題,軟件延時不準確,大量的“while( IR_Out == 0 ) ;”代碼,抗干擾能力弱,容易進入死循環(huán)。
下面介紹的這種解碼方法,利用外部中斷觸發(fā)程序,定時器定時(但沒有設(shè)置定時中斷程序,即判斷TF的值確定定時結(jié)束),在代碼過程中,開頭的一個7.93ms延時,足以濾掉不合法的紅外信號。應(yīng)該說效率質(zhì)量更高的。
代碼注釋很詳細,在此不在細述:
- /*------------------------------------------------------------*-
- IR_Decoder.C(v1.00)
- ------------------------------------------------------------
- 名稱:遙控器紅外解碼,PO口接LED,顯示功能碼以供查看
- 編寫:mhjerry
- 日期:20011.7
- 內(nèi)容:按遙控器上的按鍵,會在PO口LED上顯示
- -*------------------------------------------------------------*/
- #include"reg52.h"
- //此口為紅外信號輸入MCU口
- sbitIR_Out=P3^2;
- //主程序運行標志位,運行主程序時LED滅,運行中斷程序時LED亮
- sbitIR_Flag=P3^1;
- //LED顯示口
- #defineLED_PortP1
- //用于存放按鍵碼值,初始化為00000000這樣接受數(shù)據(jù)時可以只考慮1了
- unsignedchardat[4]={0,0,0,0};
- /*............................................................*/
- voidmain()
- {
- IR_Out=1;//此口為MCU輸入口,故需要置1
- IR_Flag=1;//滅LED燈
- TMOD=0x01;//定時器0,方式1
- IT0=1;//外部中斷0,下降沿觸發(fā)
- EX0=1;//準許外部中斷
- EA=1;//CPU準許中斷
- while(1)
- {
- IR_Flag=1;//執(zhí)行主程序時,LED燈滅
- }
- }
- /*------------------------------------------------------------*-
- 函數(shù)名稱:Int0()
- 函數(shù)輸入:無(容許中斷時,外部觸發(fā))
- 函數(shù)輸出:無
- 函數(shù)說明:外部中斷0中斷處理
- -*------------------------------------------------------------*/
- voidInt0()interrupt0
- {
- unsignedchari,j;
- EX0=0;//關(guān)閉外部中斷0
- IR_Flag=0;//執(zhí)行中斷程序時,LED燈亮
- i=10;//0.793ms延時,運行10次
- while(--i)
- {
- //定時0.793ms,延時0.793ms*10=7.93ms
- TH0=0xfc;
- TL0=0xe7;
- TR0=1;
- while(!TF0);
- TF0=0;
- TR0=0;
- //這7.93ms期間只要IR_Out變高電平,就非合法的紅外信號,跳出
- if(IR_Out)
- {
- EX0=1;//準許中斷
- return;
- }
- }
- //程序進行到這里,表明是合法的紅外信號(利用9ms判斷)
- while(!IR_Out);//等待9ms低電平過去
- //程序進行到這里,表明經(jīng)過9ms低電平
- TH0=0xf6;
- TL0=0xff;
- TR0=1;
- while(!TF0);
- TF0=0;
- TR0=0;//延時2.305ms
- //IR_Out為低表明是連發(fā)碼,不予理睬,跳出
- if(!IR_Out)
- {
- EX0=1;
- return;
- }
- //程序進行到這里,表明是引導碼,等待4.5ms高電平的過去
- while(IR_Out);
- //開始接收用戶碼
- for(i=0;i<4;i++)
- {
- for(j=0;j<8;j++)
- {
- while(!IR_Out);//等待低電平過去
- dat[i]>>=1;//把上次的數(shù)據(jù)位右移一位
- TH0=0xfc;
- TL0=0xe7;
- TR0=1;
- while(!TF0);
- TR0=0;
- TF0=0;//延時0.793ms
- //若為數(shù)據(jù)"1",則延時后IR_Out為高電平
- if(IR_Out)
- {
- dat[i]|=0x80;//所有數(shù)據(jù)位1放最高位
- while(IR_Out);//等待高電平過去
- }
- }
- }
- LED_Port=dat[2];
- EX0=1;//開中斷
- return;
- }
- /*------------------------------------------------------------*-
- ----ENDOFFILE-------------------------------------------
- -*------------------------------------------------------------*/

評論