STM32-USMART學習筆記

1.將usmart組件添加到工程文件夾下,在選項和組管理即 中,配置好頭文件路徑和組文件。
中,配置好頭文件路徑和組文件。
2.usmart.c主要包含兩個函數(shù)void usmart_init(u8 sysclk)和void usmart_scan(void),第一個函數(shù)里有個條件編譯#if USMART_ENTIM2_SCAN==1,這個在usmart.h里設(shè)置。這個宏定義初始化定時器2,本實驗在定時器2的中斷處理函數(shù)中執(zhí)行usmart_dev.scan();進行行usmart掃描,為了便于移植,中斷初始化及處理函數(shù)寫在了usamrt.c里,time.c里面的初始化和終端處理被注釋掉了。
3.特別注意:這個組件使用串口發(fā)送調(diào)試函數(shù),usart.c函數(shù)也修改了,我在測試中編譯沒問題了,但是調(diào)試沒結(jié)果,就是這個函數(shù)沒有修正過來導(dǎo)致的。
- //V1.4修改說明
- //1,修改串口初始化IO的bug
- //2,修改了USART_RX_STA,使得串口最大接收字節(jié)數(shù)為2的14次方
- //3,增加了USART_REC_LEN,用于定義串口最大允許接收的字節(jié)數(shù)(不大于2的14次方)
- //4,修改了EN_USART1_RX的使能方式
- #ifEN_USART1_RX//如果使能了接收,在usart.h里定義
- //串口1中斷服務(wù)程序
- //注意,讀取USARTx->SR能避免莫名其妙的錯誤
- //u8USART_RX_BUF[64];//接收緩沖,最大64個字節(jié).
- u8USART_RX_BUF[USART_REC_LEN];//接收緩沖,最大USART_REC_LEN個字節(jié).
- //接收狀態(tài)
- //bit7,接收完成標志
- //bit6,接收到0x0d
- //bit5~0,接收到的有效字節(jié)數(shù)目
- u16USART_RX_STA=0;//接收狀態(tài)標記
- voidUSART1_IRQHandler(void)
- {
- u8res;
- if(USART1->SR&(1<<5))//接收到數(shù)據(jù)
- {
- res=USART1->DR;
- if((USART_RX_STA&0x8000)==0)//接收未完成,由原來的80改為8000
- {
- if(USART_RX_STA&0x4000)//接收到了0x0d,由原來的40改為4000
- {
- if(res!=0x0a)USART_RX_STA=0;//接收錯誤,重新開始
- elseUSART_RX_STA|=0x8000;//接收完成了,由原來的80改為8000
- }else//還沒收到0X0D
- {
- if(res==0x0d)USART_RX_STA|=0x4000;//由原來的40改為4000
- else
- {
- USART_RX_BUF[USART_RX_STA&0X3F]=res;
- USART_RX_STA++;
- if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收數(shù)據(jù)錯誤,重新開始接收
- }
- }
- }
- }
- }
- #endif
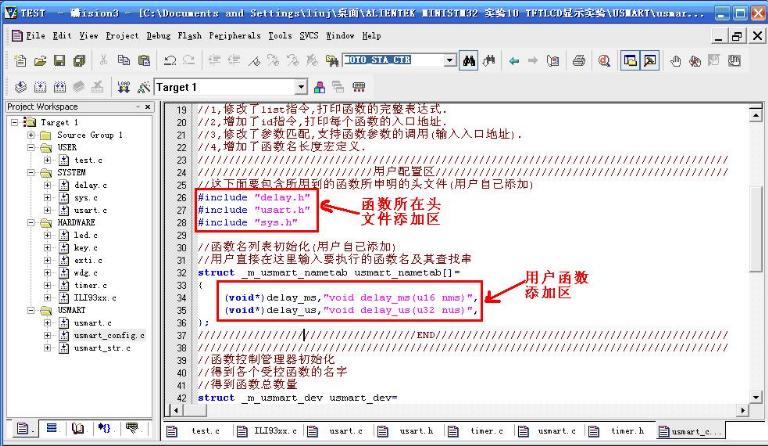
5.在usmart.h 中設(shè)置USMART_ENTIM2_SCAN==1
6.在usmart_config.c里添加想要調(diào)用的函數(shù),這里的添加函數(shù)很簡單,只要把函數(shù)所在頭文件添加進來,并把函數(shù)名按上圖所示的方式增加即可,默認我們添加了兩個函數(shù):delay_ms和delay_us。如下:
具體參考見usmart V2.4使用說明。
注意一個問題:#if和#ifdef的區(qū)別
(1)
#if 常量表達式
程序。。。//當常量表達式非零時候才編譯本段
#endif
(2)
#ifdef 標識符 //標識符經(jīng)過#define定義過無論零還是非零都編譯
程序。。。
#else
程序。。。
#endif

評論