
本文引用地址:http://www.104case.com/article/201611/320239.htm
編碼芯片PT2262發出的編碼由:地址碼、數據碼、同步碼組成。地址碼和數據碼都用寬度不同的脈沖來表示,兩個窄脈沖表示“0”;兩個寬脈沖表示“1”;一個窄脈沖和一個寬脈沖表示“F”,也就是地址碼的“懸空”;同步碼為時間較長的低電平間隔,下圖為PT2262編碼圖:
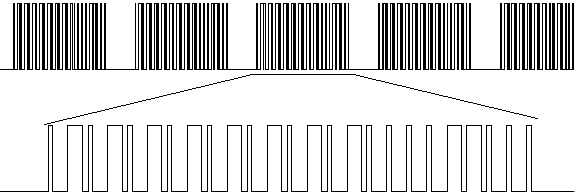
從圖中可以看出,發送碼的周期是相等的,只是脈沖寬度不同(寬脈沖與窄脈沖之比為3:1)。而同步碼的低電平時間約為這個周期的8倍.
解碼的關鍵是識別同步碼,然后對后面的字碼的脈沖寬度進行識別,就可以解出這個編碼。pt2262每次發射時至少發射4組字碼,每組字碼由25個脈沖組成,前24個脈沖為地址和數據,最后一個脈沖和一低電平間隔組成同步碼。下面我們來說說如何用51單片機對其進行解碼。由于程序結構不復雜,就不再畫流程圖,首先我們讓Timer0工作在定時狀態,初始化值使其能在同步碼未結束時溢出,利用Timer0的溢出中斷來初始化,準備接收后來數據,同時將Timer0設為門控定時,也就是TMOD的GATE0位為1,此模式下,只有TR0=1并且INT0=1才計數,此模式可以用來測量脈沖寬度.這樣就識別出了同步碼.數據由INT0輸入,INT0設為跳變觸發,每中斷一次就取TH0和TL0之和,這個和就是前一個的脈沖寬度.判斷出是寬脈沖還是窄脈沖.由于上述的同步碼周期與地址數據周期都遠小于定時器0的定時時間,所在定時器0正常工作時,是不會溢出的.以下為程序,程序的功能是分別解出地址碼與按鍵碼(也就是數據碼),然后用串口輸出.解碼時寬脈沖為1,窄脈沖為0.低位放到接收碼的最高位,也就是解碼結果與原數據位顛倒了.至于想要什么結果,可以做相應的處理,當然包括變換成地址的三進制格式.因為寬脈沖的脈寬與低脈沖的脈寬相差很大,所以解碼很容易,下面為振蕩電阻為1M時的程序,同樣可用來解碼振蕩電阻為1.2M的編碼.振蕩電阻決定脈沖的寬度,可以修改程序來適應不同的震蕩電阻,下面是c程序代碼:
//測試條件:單片機為AT89S51,晶振12M,振蕩電阻1MΩ
#include< AT89X51.h>
#include< stdio.h>
unsigned int addr,key;
unsigned char cntint;//外部中斷0計數
void eint0(void) interrupt 0//外部中斷0
{
static unsigned int tempaddr;//接收地址緩存
static unsigned int tempkey;//接收數據緩存
unsigned int timecnt;
timecnt=TH0*256+TL0;
TH0=0;
TL0=0;
if(cntint<16)//接收地址碼
{
tempaddr=tempaddr<<1;//將接收的到最低位移到最高位
if(timecnt>210)//210為寬脈沖與低脈沖界線,當振蕩電阻為1M時,窄脈沖為110uS,寬脈沖為320uS
{
tempaddr|=1;//寬脈沖為1
}
cntint++;//中斷次數加1
}
else if(cntint<24)//接收數據碼
{
tempkey=tempkey<<1;
if(timecnt>120)
{
tempkey|=1;
}
cntint++;
}
else//cntint大于24也就是中斷了25次時,關閉外部中斷0,等待同步碼
{
TMOD&=0xf0;//設定時器0為定時方式
TMOD|=0x01;
TH0=0xf9;
TL0=0x66;
cntint=0;
EX0=0;//關外部中斷0
addr=tempaddr;
key=tempkey;
tempaddr=0;
tempkey=0;
}
}
void timer0(void) interrupt 1//定時器0中斷,只有初始化時,空閑時和同步碼到來時才中斷
{
TMOD&=0xf0;//將定時器0的工作方式設為門控定時,用以檢測脈寬。
TMOD|=0x09;
cntint=0;//外部中斷0中斷次數設為0
TH0=0;//設定時器0定時初值為0
TL0=0;
EX0=1;//允許外部中斷0
IE0=0;//清除外部中斷0標志
}
void main(void)
{
void sendd(unsigned int intnum);
unsigned int i;
TMOD=0x21;//設定定時器0和定時器1,定時器1用來驅動串口
TH0=0xf9;//設定定時器的初始值,這個值必小于同步碼
TL0=0x66;
TH1=243;//12M晶振時,串口波特率為2400
TL1=243;
SCON=0x50;//設定串口工作方式
TI=1;//要用printf就將其設為1
EA=1;//開所有中斷
ET0=1;//開定時器0中斷
EX0=0;//關外部中斷0,在Timer0中斷里面將其打開
IT0=1;//外部中斷0設為跳變觸發
TR0=1;//定時器0啟動
TR1=1;//定時器1啟動
while(1)
{
printf("%u",addr);//輸出解碼地址
printf("%u",key);//輸出解碼數據
for(i=0;i<3000;i++);//這個用來防止串口不同步
}
}


評論