#ifndef TWI_H
#define TWI_H
本文引用地址:http://www.104case.com/article/201611/320227.htm//主機模式啟動狀態碼
#define TWI_START 0X08
#define TWI_RESTART 0X10
//主機發送模式狀態碼
#define TWI_MT_SLA_ACK 0X18 //SLA+W 已發送,接收到ACK
#define TWI_MT_SLA_NACK 0X20 //SLA+W 已發送,接收到NOT ACK
#define TWI_MT_DATA_ACK 0X28 //數據已發送,接收到ACK
#define TWI_MT_DATA_NACK 0X30 //數據已發送,接收到NOT ACK
#define TWI_MT_ARB_LOST 0X38 //SLA+W 或數據的仲裁失敗
//主機接收模式狀態碼
#define TWI_MR_ARB_LOST 0X38 //SLA+R 或數據的仲裁失敗
#define TWI_MR_SLA_ACK 0X40 //SLA+R 已發送,接收到ACK
#define TWI_MR_SLA_NACK 0X48 //SLA+R 已發送,接收到NOT ACK
#define TWI_MR_DATA_ACK 0X50 //數據已接收,接收到ACK
#define TWI_MR_DATA_NACK 0X58 //數據已接收,接收到NOT ACK
//從機接收模式狀態碼
#define TWI_SR_SLA_ACK 0X60 //自己的SLA+W 已經被接收,ACK 已返回
#define TWI_SR_ARB_LOST_SLA_ACK 0X68 //SLA+R/W 作為主機的仲裁失敗;自己的SLA+W 已經被接收,ACK 已返回
#define TWI_SR_GCALL_ACK 0X70 //接收到廣播地址,ACK 已返回
#define TWI_SR_ARB_LOST_GCALL_ACK 0X78 //SLA+R/W 作為主機的仲裁失敗;接收到廣播地址ACK 已返回
#define TWI_SR_DATA_ACK 0X80 //以前以自己的 SLA+W 被尋址;數據已經被接收ACK 已返回
#define TWI_SR_DATA_NACK 0X88 //以前以自己的 SLA+W 被尋址;數據已經被接收NOT ACK 已返回
#define TWI_SR_GCALL_DATA_ACK 0X90 //以前以廣播方式被尋址;數據已經被接收ACK 已返回
#define TWI_SR_GCALL_DATA_NACK 0X98 //以前以廣播方式被尋址;數據已經被接收NOT ACK 已返回
#define TWI_SR_STOP 0XA0 //在以從機工作時接收到STOP或重復START
//從機發送模式狀態碼
#define TWI_ST_SLA_ACK 0XA8 //自己的SLA+R 已經被接收ACK 已返回
#define TWI_ST_ARB_LOST_SLA_ACK 0XB0 //SLA+R/W 作為主機的仲裁失敗;自己的SLA+R 已經被接收ACK 已返回
#define TWI_ST_DATA_ACK 0XB8 //TWDR 里數據已經發送,接收到ACK
#define TWI_ST_DATA_NACK 0XC0 //TWDR 里數據已經發送,接收到NOT ACK
#define TWI_ST_LAST_DATA 0XC8 //TWDR 的一字節數據已經發送(TWAE = “0”);接收到ACK
//其他狀態
#define TWI_NO_INFO 0xF8 //沒有相關的狀態信息,TWINT=0
#define TWI_BUS_ERROR 0x00 //由于非法的START或STOP引起的總線錯誤
//TWI使用時的控制位
#define TWI_Start() TWCR = (1< //清零TWINT、清零start狀態、使能TWI.發出START 信號
#define TWI_Wait() while (!(TWCR & (1< //等待TWINT 置位, TWINT 置位表示START 信號已發出
#define TWI_Status (TWSR & 0xF8) //檢驗TWI 狀態寄存器,屏蔽預分頻位
#define TWI_Stop() TWCR=(1< //發送STOP 信號
#define TWI_SendAck() (TWCR|=(1< //使能TWI應答
#define TWI_SendNoAck() (TWCR&=~(1< //不使能TWI應答
#define TWI_RcvNckByte() (TWCR=(1< //使能TWI不產生應答
#define TWI_RcvAckByte() (TWCR=(1< //使能TWI、產生應答
#define TWI_Writebyte(twi_d) {TWDR=(twi_d);TWCR=(1<// 定義TWI運行狀態的極性
#define TWI_ERR 0
#define TWI_CRR 1
#define TWI_WRITE 0
#define TWI_READ 1
void delay(uint ms)
{
uint i,j;
for(i=ms;i>0;i--)
for(j=1141;j>0;j--);
}
void TWI_Init(void)
{
TWBR=0X0F;
TWSR=0;
}
uchar TWIWait(void)
{
uchar i=100;
while(!(TWCR&(1< //等待TWINT置1
{
if((--i)==0)
return TWI_ERR;
}
return TWI_CRR;
}
uchar TWIStart(void)
{
TWI_Start();
if(TWIWait()==TWI_ERR)
return TWI_ERR;
if(TWI_Status!=TWI_START)
return TWI_ERR;
return TWI_CRR;
}
uchar TWIREStart(void)
{
TWI_Start();
if(TWIWait()==TWI_ERR)
return TWI_ERR;
if(TWI_Status!=TWI_RESTART)
return TWI_ERR;
return TWI_CRR;
}
uchar TWI_Write_WADDR(uchar addr)
{
TWI_Writebyte(addr);
if(TWIWait()==TWI_ERR)
return TWI_ERR;
if(TWI_Status!=TWI_MT_SLA_ACK)
return TWI_ERR;
return TWI_CRR;
}
uchar TWI_Write_RADDR(uchar addr)
{
TWI_Writebyte(addr);
if(TWIWait()==TWI_ERR)
return TWI_ERR;
if(TWI_Status!=TWI_MR_SLA_ACK)
return TWI_ERR;
return TWI_CRR;
}
uchar TWI_SendData(uchar data)
{
TWI_Writebyte(data);
if(TWIWait()==TWI_ERR)
return TWI_ERR;
if(TWI_Status!=TWI_MT_DATA_ACK)
return TWI_ERR;
return TWI_CRR;
}
uchar TWI_ReciveDATA_ACK(uchar *pdata)
{
TWI_RcvAckByte();
if(TWIWait()==TWI_ERR)
return TWI_ERR;
if(TWI_Status!=TWI_MR_DATA_ACK)
return TWI_ERR;
*pdata=TWDR;
return TWI_CRR;
}
uchar TWI_ReciveDATA_NACK(uchar *pdata)
{
TWI_RcvNckByte();
if(TWIWait()==TWI_ERR)
return TWI_ERR;
if(TWI_Status!=TWI_MR_DATA_NACK)
return TWI_ERR;
*pdata=TWDR;
return TWI_CRR;
}
uchar TWI_W_Byte(uchar Maddr,uchar Saddr,uchar data)
{
if(TWIStart()==TWI_ERR)
return TWI_ERR;
if(TWI_Write_WADDR((Maddr&0xfe)|TWI_WRITE)==TWI_ERR) //保證寫入的SLA+W正確
return TWI_ERR;
if(TWI_SendData(Saddr)==TWI_ERR) //器件內寄存器的地址作為一般數據發送
return TWI_ERR;
if(TWI_SendData(data)==TWI_ERR) //發送要寫入的數據
return TWI_ERR;
TWI_Stop();
return TWI_CRR;
}
uchar TWI_W_Data(uchar Maddr,uchar Saddr,uchar *pdata,uchar num)
{
uchar i;
if(TWIStart()==TWI_ERR)
return TWI_ERR;
if(TWI_Write_WADDR((Maddr&0xfe)|TWI_WRITE)==TWI_ERR) //保證寫入的SLA+W正確
return TWI_ERR;
if(TWI_SendData(Saddr)==TWI_ERR) //器件內寄存器的地址作為一般數據發送
return TWI_ERR;
for(i=0;i {
if(TWI_SendData(*(pdata++))==TWI_ERR)
return TWI_ERR;
}
TWI_Stop();
return TWI_CRR;
}
uchar TWI_R_Byte(uchar Maddr,uchar Saddr,uchar *pdata)
{
if(TWIStart()==TWI_ERR)
return TWI_ERR;
if(TWI_Write_WADDR((Maddr&0xfe)|TWI_WRITE)==TWI_ERR) //保證寫入的SLA+W正確
return TWI_ERR;
if(TWI_SendData(Saddr)==TWI_ERR) ////器件內寄存器的地址作為一般數據發送
return TWI_ERR;
if(TWIREStart()==TWI_ERR) //這里的重新發送start很重要,這里我們的主機不想放棄TWI的使用權 參看《深入淺出AVR單片機》289頁
return TWI_ERR;
if(TWI_Write_RADDR((Maddr&0xfe)|TWI_READ)==TWI_ERR) //參看《深入淺出AVR單片機》289頁
return TWI_ERR;
if(TWI_ReciveDATA_NACK(pdata)==TWI_ERR) //讀取數據時,最后1字節的數據讀取完成以后發送NAK而不是ACK
return TWI_ERR;
TWI_Stop();
return TWI_CRR;
}
uchar TWI_R_Data(uint Maddr,uchar Saddr,uchar *pdata,uchar num)
{
uchar i;
if(TWIStart()==TWI_ERR)
return TWI_ERR;
if(TWI_Write_WADDR((Maddr&0xfe)|TWI_WRITE)==TWI_ERR)
return TWI_ERR;
if(TWI_SendData(Saddr)==TWI_ERR)
return TWI_ERR;
if(TWIREStart()==TWI_ERR)
return TWI_ERR;
if(TWI_Write_RADDR((Maddr&0xfe)|TWI_READ)==TWI_ERR)
return TWI_ERR;
for(i=0;i {
if(TWI_ReciveDATA_ACK(pdata+i)==TWI_ERR)
return TWI_ERR;
}
if(TWI_ReciveDATA_NACK(pdata+i)==TWI_ERR) //讀取數據時,最后1字節的數據讀取完成以后發送NAK而不是ACK,這點很重要
return TWI_ERR;
TWI_Stop();
return TWI_CRR;
}
uchar TWI_W_NAddr(uchar addr,uchar data)
{
if(TWIStart()==TWI_ERR)
return TWI_ERR;
if(TWI_Write_WADDR(addr)==TWI_ERR)
return TWI_ERR;
if(TWI_SendData(data)==TWI_ERR)
return TWI_ERR;
TWI_Stop();
return TWI_CRR;
}
uchar TWI_R_NAddr(uchar addr,uchar *pdata)
{
if(TWIStart()==TWI_ERR)
return TWI_ERR;
if(TWI_Write_RADDR(addr)==TWI_ERR)
return TWI_ERR;
if(TWI_ReciveDATA_NACK(pdata)==TWI_ERR)
return TWI_ERR;
TWI_Stop();
return TWI_CRR;
}
#endif
#include
#include "IIC.h"
void port_init(void)
{
DDRB=0XFF;
PORTB=0XFF;
TWCR=0X44;
DDRD=0XFF;
PORTD=0XFF;
}
uchar temp1[8]={18,17,16,15,14,13,12,11};
uchar temp2[8]={0};
uchar temp3[8]={0,0,0,0,0,0,0,0};
void main(void)
{
TWI_Init();
port_init();
if(TWI_W_Data(0Xa0,0x00,temp1,8)==TWI_ERR)
PORTD&=~(BIT(PD0));
delay(5); //這里的延時很重要,如果不加,讀出來的數據很是匪夷所思
if((TWI_R_Data(0Xa1,0x00,temp2,8))==TWI_ERR)
PORTD&=~BIT(PD7);
if(temp2[1]==17)
PORTB=0X00;
while(1)
{
if(temp2[0]==18)
{
PORTB=0XFE;
delay(100);
PORTB=0XFF;
delay(50);
}
if(temp2[1]==17)
{
PORTB=0XFD;
delay(100);
PORTB=0XFF;
delay(50);
}
if(temp2[2]==16)
{
PORTB=0XFB;
delay(100);
PORTB=0XFF;
delay(50);
}
if(temp2[3]==15)
{
PORTB=0XF7;
delay(100);
PORTB=0XFF;
delay(50);
}
if(temp2[4]==14)
{
PORTB=0XEF;
delay(100);
PORTB=0XFF;
delay(50);
}
if(temp2[5]==13)
{
PORTB=0XDF;
delay(100);
PORTB=0XFF;
delay(50);
}
if(temp2[6]==12)
{
PORTB=0XBF;
delay(100);
PORTB=0XFF;
delay(50);
}
if(temp2[7]==11)
{
PORTB=0X7F;
delay(100);
PORTB=0XFF;
delay(50);
}
}
}
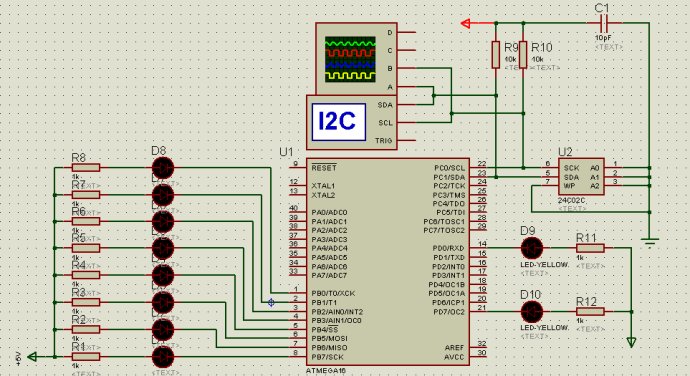
仿真PROTUES7.5圖如下
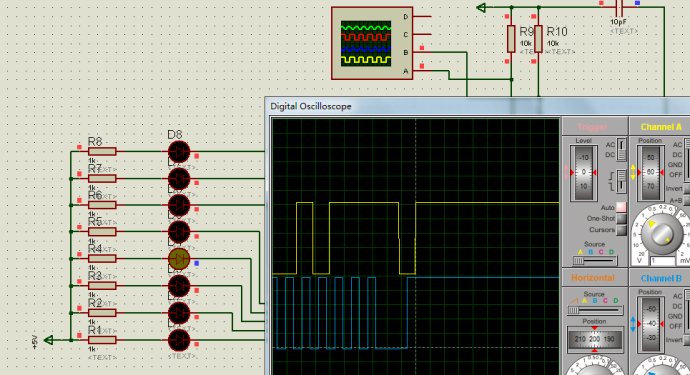
示波器查看波形如圖
IIC接收數據查看如圖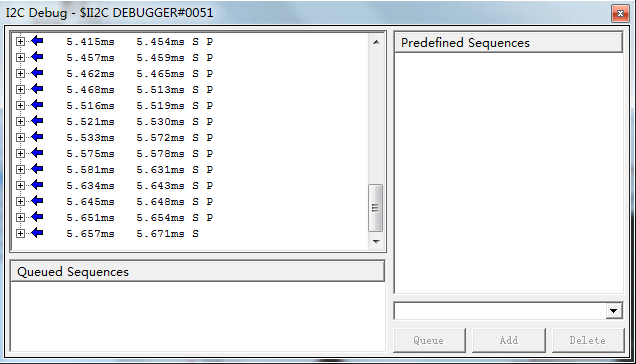


評論