用PIC18F458的CAN模塊實現CAN總線通訊

CAN(Controller Area Network)即控制器區域網,是一種主要用于各種設備監測及控制的網絡。CAN 具有獨特的設計思想, 良好的功能特征和極高的可靠性,現場抗干擾能力強。其在國內外工業控制領域已經被廣泛應用, 成為最有發展前途的現場總線之一。
本文引用地址:http://www.104case.com/article/201611/319436.htm美國微芯公司的PIC18F458 單片機集成了CAN 通信接口,執行Bosch 公司的CAN2.0A/B 協議。它能支持CAN1.2、CAN2.0A、CAN2.0B 協議的舊版本和CAN2.0B現行版本。使用PIC18F458 單片機的嵌入式系統, 可以很方便的利用CAN 總線與外界進行數據交換。它的優點是電路接口比較簡單,只需很少的外圍電路就可實現CAN 通信, 受硬件限制比較少;軟件編程容易實現所需功能, 只需對相關寄存器進行正確設置即可。
1 硬件接口電路
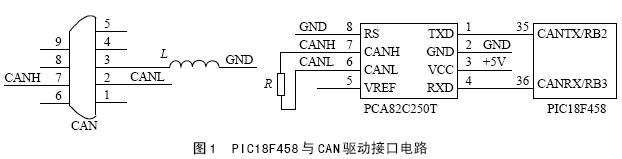
PIC18F458 與CAN 驅動芯片PCA82C250T 的接口電路如圖1 所示。PCA82C250T 是驅動CAN 控制器和物理總線間的接口, 提供對總線的差動發送和接收功能。電阻R 作為CAN 終端的匹配電阻;電感L 起濾波作用。
2 CAN 控制器的操作
2.1 初始化CAN 控制
在使用CAN 之前, 必須對它的一些內部寄存器進行設置, 如CAN 控制寄存器CANCON 、波特率寄存器BRGCONx 的設置以及對郵箱進行初始化。
波特率寄存器BRGCONx(x=1,2, 3)決定了CAN 控制器的波特率、采樣次數、同步跳轉寬度和重同步方式,對波特率寄存器的配置步驟如下:
設置CANCON 寄存器中的C A N 操作方式請求位為1xx,即REQOP=1xx;
判斷CANSTAT 寄存器中的操作方式狀態位是否為100,即OPMODE 是否為100,如OPMODE=100 則進入下一步;
設置BRGCONx(x=1,2,3)寄存器,即配置正確的波特率, 同步跳轉寬度、采樣次數和重同步方式;
設置發送郵箱和接收郵箱的標識符、郵箱數據長度、屏蔽寄存器、濾波寄存器以及初始化郵箱的數據區;
設置CANCON 寄存器中的CAN 操作方式請求位為000,即REQOP=000,使CAN 模塊進入正常工作方式;
判斷CANSTAT 寄存器中的操作方式狀態位是否為000,即OPMODE 是否為000,如OPMODE=000 則進入下一步;
寄存器配置和郵箱初始化完成后,進入正常工作方式。
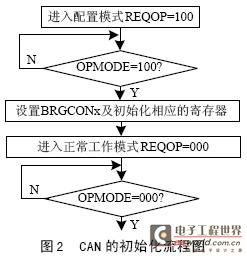
初始化流程圖如圖2 所示。
2.2 信息的發送
PIC18F458 有3 個發送郵箱緩沖器,每一個發送緩沖器的數據長度可以設置為1 ~ 8 個字節長度, 信息發送的具體步驟如下:
① 初始化發送郵箱;
② 設置相應的發送請求位為1 ,即TXBxCON bits.TXREQ=1(x=1,2,3);
③ 若CAN 總線允許發送, 則啟動最高優先級信息的發送;
④ 若發送成功,則TXREQ 被清零,TXBxIF 被置1,如果中斷被使能, 則會產生中斷;
⑤ 若信息發送失敗,則TXREQ 保持為1 ,并置位相應的狀態標志。
2.3 信息的接收
PIC18F458 有2 個具有多重接收濾波器的完全接收緩沖器和1 個單獨信息組合的緩沖器。接收郵箱初始化時,要設置其標識符及相關的屏蔽寄存器、接收優先級等。
MAB 寄存器接收所有來自總線的下一條信息,RXB0 和RXB1 則接收來自協議驅動的完整信息。MAB 接收所有信息, 但是只有滿足過濾條件的信息才被傳送到RXBx 中。
3 軟件設計
下面的程序例程實現的是發送緩沖器0 向接收緩沖器0 發送數據的自測試模式, 其中接收采用中斷方式,發送采用查詢方式。該程序實現了PIC18F458 單片機CAN 模塊的最小程序, 經過適當修改即可用于實際工程程序中, 并在實現工程中驗證了它的正確性。
#include
int CAN_FLAG;
voidiNItcan(){
TRISB=(TRISB|0X08)&0XFB;
CANCON=0X80;
while(CANSTAT&0X80==0)continue;
BRGCON1=0X01;
BRGCON2=0X90;
BRGCON3=0X42;
TXB0CON=0X03;
TXB0SIDH=0XFF;
TXB0SIDL=0XE0;
TXB0DLC=0X08;
TXB0D0=0X00;
TXB0D1=0X01;
TXB0D2=0X02;
TXB0D3=0X03;
TXB0D4=0X04;
TXB0D5=0X05;
TXB0D6=0X06;
TXB0D7=0X07;
RXB0SIDH=0XFF;
RXB0SIDL=0XE0;
RXB0CON=0X20;
RXB0DLC=0X08;
RXB0D0=0X00;
RXB0D1=0X00;
RXB0D2=0X00;
RXB0D3=0X00;
RXB0D4=0X00;
RXB0D5=0X00;
RXB0D6=0X00;
RXB0D7=0X00;
RXF0SIDH=0XFF;
RXF0SIDL=0XE0;
RXM0SIDH=0X00;
RXM0SIDL=0X00;
CANCON=0X40;
while(CANSTAT&0X40==0)continue;
PIR3=0X00;
PIE3=0X01;
IPR3=0X01;
}
#pragma interrupt can_isr
#pragma CODe low_ISR=0x18
void low_ISR() {
_asm
gotocan_isr
_endasm
}
#pragma code
voidcan_isr() {
if(PIR3bits.RXB0IF==1)CAN_FLAG=1;
PIR3bits.RXB0IF=0;
RXB0CONbits.RXFUL=0;
}
main(){
INTCON=0x00;
initcan();
W D T C O N = 0 ;
INTCON=0xc0;
while(1) {
TXB0CONbits.TXREQ=1;
while(PIR3bits.TXB0IF!=1)continue;
while(CAN_FLAG==0)continue;
CAN_FLAG=0;
TXB0CONbits.TXREQ=0;
TXB0D0=RXB0D0+1;
TXB0D1=RXB0D1+1;
TXB0D2=RXB0D2+1;
TXB0D3=RXB0D3+1;
TXB0D4=RXB0D4+1;
TXB0D5=RXB0D5+1;
TXB0D6=RXB0D6+1;
TXB0D7=RXB0D7+1;
}
}

評論