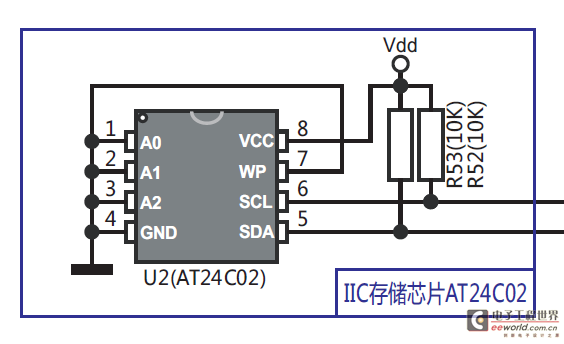
PIC IIC & 24c02

#include
__CONFIG(1,XT) ;
__CONFIG(2,WDTDIS) ;
__CONFIG(4,LVPDIS) ;
#define uint unsigned int
#define uchar unsigned char
#define nop NOP()
#define scl RC3 //時鐘線
#define sda RC4 //數據線
char shuma[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
uint count=0;
uchar sec;
void usdelay()
{
nop; //其實在用IIC對EEPROM操作時,它反應很快,延時可以很短,但必須延時,只要一個NOP()就可以了
}
void init_24c() //初始化24C,就是把兩根線拉高
{
TRISC4=0;
scl=1;
sda=1;
usdelay();
}
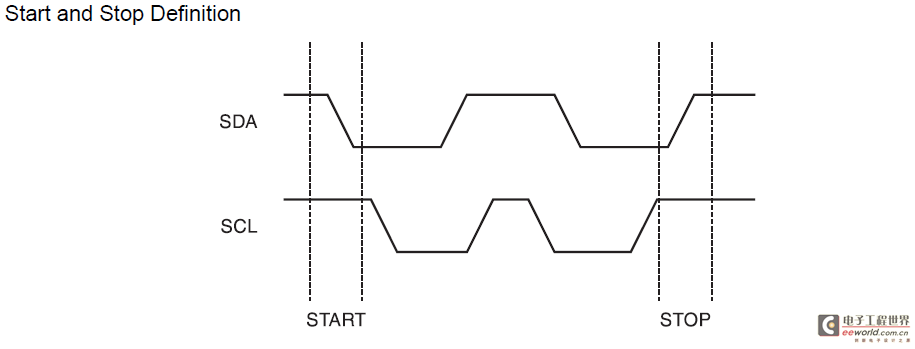
void start() //開始信號,根據時序圖(sx)
{
TRISC4=0;
scl=1;
usdelay();
sda=1;
usdelay();
sda=0;
}
void stop() //結束信號 sx
{
TRISC4=0;
scl=1;
usdelay();
sda=0;
usdelay();
sda=1;
}
void ack() //不知道為什么,在PIC中不能用ack,好像一用就會出錯= =?
{
uchar i;
TRISC4=0;
sda=1;
nop;
TRISC4=1;
scl=1;
nop;
while(sda==1&&i<10)i++;
scl=0;
}
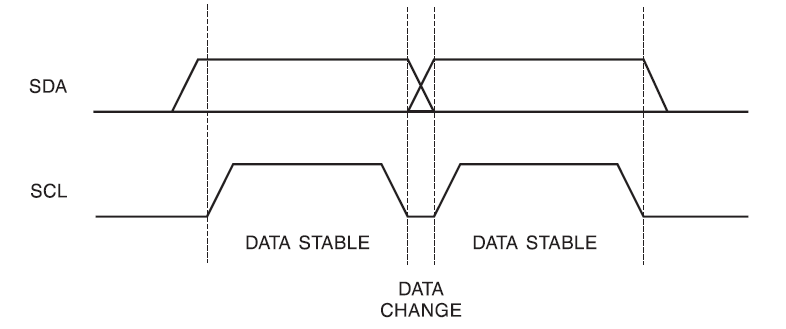
void write_byte(uchar dat) //寫字節 sx 由于不僅要寫數據,還要寫地址,所以只能先寫字節的最高位R7,最后寫最低位R0
{
uchar i;
TRISC4=0;
sda=0;
scl=0;
nop;
for(i=0;i<=8;i++)
{
sda=(dat&0x80)>>7;
nop;
scl=1;
nop;
scl=0;
dat<<=1;
nop;
}
}
uchar read_byte() //讀字節 sx 先讀高位R7,最后讀地位R0
{
uchar i,dat=0;
TRISC4=1;
sda=0;
usdelay();
scl=1;
usdelay();
for(i=0;i<8;i++)
{
dat<<=1;
usdelay();
scl=1;
nop;
dat=dat|sda;
nop;
scl=0;
usdelay();
}
return dat;
}
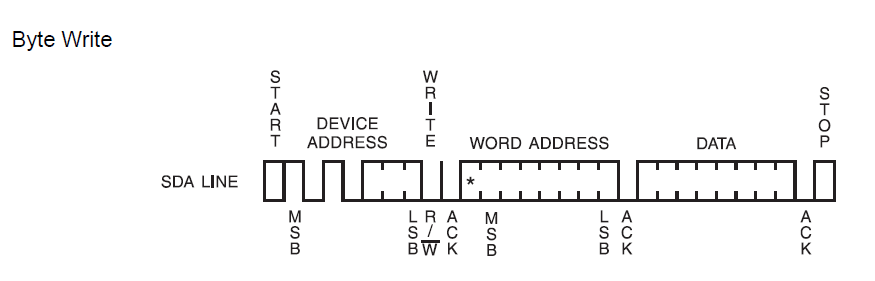
void write_add(uchar add,uchar dat) //寫數據到地址 sx 注意不要用ack
{
start();
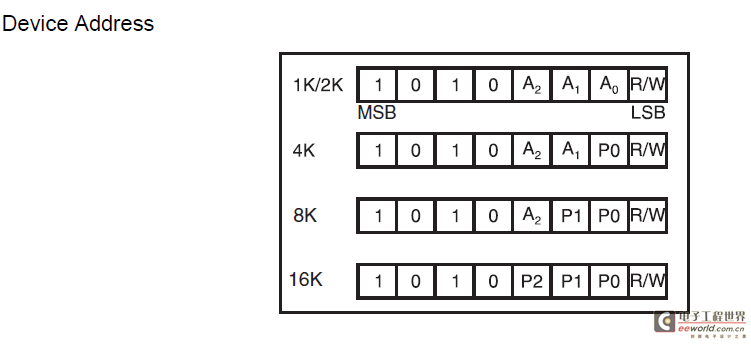
write_byte(0xa0);
write_byte(add);
write_byte(dat);
stop();
}
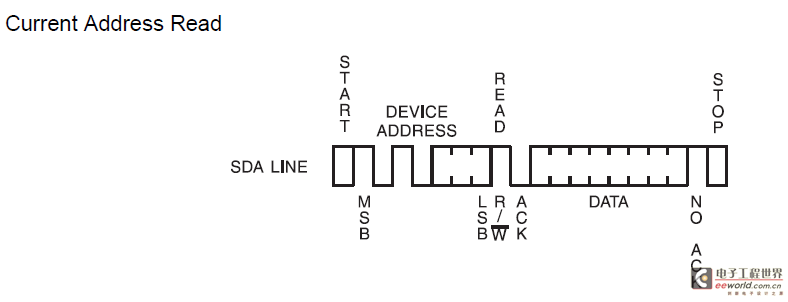
uchar read_add(uchar add) //從地址讀數據 sx 注意不要用ack
{
uchar dat;
start();
write_byte(0xa0);
write_byte(add);
start();
write_byte(0xa1);
dat=read_byte();
stop();
return dat;
}
void interrupt kaito() //定時器中斷0
{
if(TMR0IF==1)
{
TMR0IF=0;
TMR0=0xff13;
count++;
if(count==4000)
{
count=0;
sec++;
if(sec>9)
sec=0;
write_add(0x10,sec); //每次要顯示的數據發生變化,就寫入到24c02中存起來,方便斷電后保留
}
}
}
void main(void)
{
sec=0;
ADCON1=0X06;
TRISD=0x00;
TRISC3=0;
TRISC4=0;
init_24c();
GIE=1;
IPEN=0;
TMR0IE=1;
TMR0IF=0;
T0CON=0x88;
TMR0=0xff13;
GIE=1;
sec=read_add(0x10);
while(1)
{
PORTD=shuma[sec];
}
}
就是感覺很奇怪,為什么不能用attack,時序圖上明明有,可是一寫上就是錯的= =?
達到效果,定時器計數,數碼管顯示,如果關機或者復位,數碼管從關機前的數開始繼續計數。
如果對一個地址以前沒有用過,它里面存的是出廠時設置在里面的數據,很多是ff,如果不對它做正確的寫入,讀出的數據就會是ff,如果用1602來顯示,要取十位和個位,都是f,在加上顯示時的0x30,就變成0x59,和0x35,顯示出來的就是I5
還有在定時器中斷中要寫入多個數據,必須按照條件分開寫入,同時寫入的話會有幾條語句可能寫入失敗。

評論