基于WorldFIP現場總線的振動測量儀表開發

1 WorldFIP現場總線概述
本文引用地址:http://www.104case.com/article/201611/319043.htmWorldFIP選擇OSI模型中的物理層,數據鏈路層和應用層。物理層能支持的通信速度為31.25kb/s、1Mb/s及2.5Mb/s。傳輸介質為屏蔽雙絞線或光纖。數據傳送使用ManchesterⅡ編碼機制,好處是內含時鐘信息。數據鏈路層采用緩沖區數據傳送機制支持變量交換和報文傳送,具有周期和非周期兩種傳送方式。WorldFIP在介質訪問控制機制為令牌方式,總線通信機制由總線仲裁器管理。它主要行使三種功能:掃描周期變量、掃描非周期變量和報文傳送。WorldFIP現場總線網絡中,同一時刻各個站根據行使功能的不同可分為兩類,即總線仲裁器和生產者/使用者。任何WorldFIP站都具有行使這兩種功能的能力,但是在任何一個給定瞬間,只有一個站可以執行總線仲裁功能。應用層提供的服務包括:本地讀寫、遠程讀寫、指示服務以及數據有效性驗證等。
2 儀表的總體設計
本儀表電路原理圖如圖1所示,主要由采集模塊和通信模快兩大部分組成。采集模塊由交、直流數據采集電路和鍵相信號整形電路組成。原始振動信號首先經過交直流分離分成兩路,交流信號經過由MAX291組成的濾波電路和信號調理電路后,進入二次濾波電路,二次濾波電路采用MAX291內部的運算放大器,這樣可以消除前一級開關電容濾波器所產生的尖峰脈沖,并且可以對信號的振幅進行調整以方便A/D轉換。MAX291的截止頻率可由單片機控制。A/D轉換器選用MAX186,該芯片具有8路模擬輸入及SPI串行輸出,由于68HC12自帶SPI口,因此可方便的與MAX186相連。工作過程中, A/D轉換器依次對8個通道進行輪回轉換, MAX186的采樣速度高達133kb/s,采樣結果的相位誤差很小,對數據分析影響不大。由于直流分量(間隙電壓)僅反映間隙,設備運行中一般變化不大,而68HC12內嵌的8路A/D轉換器分辨率達10位,因此可直接用于直流分量的采集。
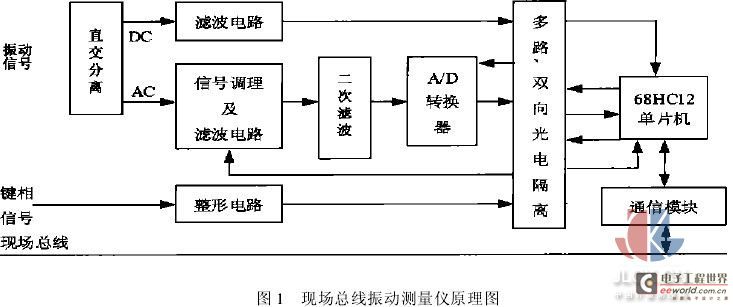
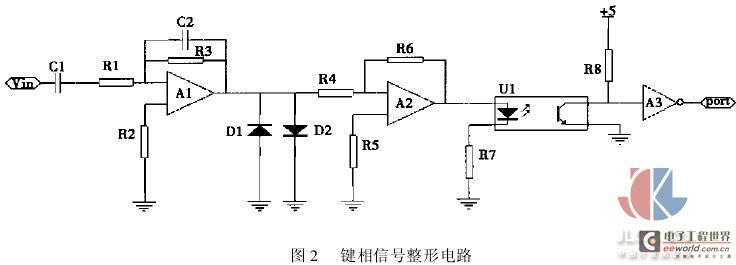
在鍵相信號整形電路中,脈沖信號電平變化范圍一般在-8~-22V之間,而且由于現場的干擾,此信號不能直接使用,必須經過一系列預處理。預處理電路主要由隔離電路、限幅電路、反相放大電路、濾波電路、光電耦合電路和單穩態電路組成。最后變換成0~5V標準脈沖信號,其原理圖如圖2所示。鍵相脈沖到達后,經隔離電路濾去直流成分,交流部分由二極管組成的限幅電路進行幅值限定,反相放大器和濾波電路進一步調整脈沖的幅度,并濾去其中的干擾脈沖。光電耦合電路實現單片機和前向通路之間的隔離,以免單片機受強電壓和共模干擾的影響。A3為由555構成的單穩態電路,產生5V電壓脈沖供單片機使用。
此外,由于振動測量數據采集量大,單片機內部所提供的RAM不能滿足要求,因此必須擴展外部存儲器以暫存采集的數據。由于68HC12工作在單片模式下,對外不提供地址和數據總線,因此,必須通過模擬總線時序實現擴展存儲器訪問。現場總線通信控制器選用的是MICROFIP,由于與68HC12的讀寫時序不匹配,因此訪問MICROFIP模塊也只能采用模擬總線時序。這相應的增加了軟件的代碼量。其接口電路圖如圖3所示。
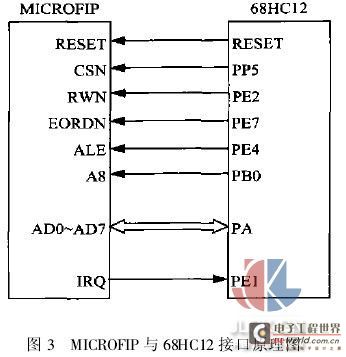
MICROFIP的讀寫時序通過組態設置為Motroro-la風格的地址數據復用總線工作時序,其地址數據復用線AD0~AD7與68HC12的端口A相連, PB0與MICROFIP的A8相連,兩芯片復位引腳相連,上電時MICROFIP隨68HC12一起復位。MCIROFIP的IRQ腳連接68HC12的IRQ引腳。片選信號CSN與PP5連接,低電平有效。MICROFIP的EORDN和RWN管腳分別與PE7和PE2連接,但此時PE2和PE7不用作特殊用途,只當作一般的I/O口使用,均為低電平有效。
3 軟件實現
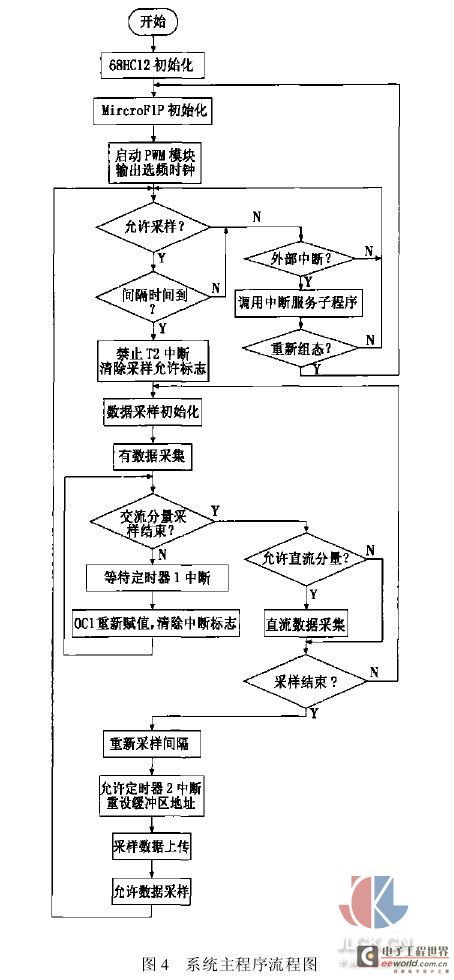
儀表的軟件部分采用模塊化軟件設計技術,包括主程序模塊、A/D轉換模塊、PWM輸出模塊、轉速預估模塊、EEPROM編程擦除模塊、通信模塊、定時器中斷服務模塊、外部中斷服務模塊、模擬總線時序模塊、MICROFIP模擬總線時序模塊、自檢模塊等。其中通信模塊包括MICROFIP初始化模塊,變量讀寫模塊,消息收發模塊。主程序模塊是系統軟件的核心,其流程如圖4所示。本部分將通過介紹系統主程序模塊來說明儀表的整個工作進程。
系統上電后,立即開始初始化過程,設定68HC12工作模式,端口E工作方式,定時器各端口工作方式,看門狗功能,外部中斷響應方式,設定中斷優先級,分配堆棧空間等操作。之后,系統開始對通信控制器MICROFIP進行初始化,設定MICROFIP各控制器的初值。接著,初始化PWM功能塊,并按默認值設定輸出脈沖周期和占空比,此脈沖信號將作為MAX291的輸入時鐘。本設計是以汽輪機轉軸為假想測量對象,因此其基頻為50Hz,一般前相通路中將濾掉其12.5倍頻以上的高頻成份,而MAX291的輸入時鐘和截止頻率比為100∶1;因此, PWM的輸出時鐘頻率應為100*12.5*50=62 500Hz。接下來,系統將連續查詢采樣允許控制寄存器的值,如禁止采樣,系統將繼續查詢外部中斷標志寄存器,如沒有系統將繼續查詢采樣允許控制寄存器,如此循環。如果有外部中斷產生,系統立即進入其中斷服務子程序,讀取MICROFIP中斷狀態寄存器的內容,看上位機是否有新的組態設置要求,如有則開始按要求設置新的組態參數,并重新對MICROFIP進行初始化。如果沒有新的組態要求,則系統退出中斷服務子程序后,直接查詢采樣控制寄存器,等待上位機的開始采樣命令。收到命令后,開始一次數據采集過程,將采集的數據送入現場實時數據庫。
系統每開始一次數據采集,總是對通道8個通道進行輪流采集,因此每開始一次采集都有8個數據產生,如果某些通道不要求采集,系統依舊維持原有的輪流次序,但是舍棄這些通道對應的采集數據,這樣做的好處是可維持誤差的恒定,有利于以后的誤差分析。如果本周期的最后一次交流采樣完畢后,系統將進入直流信號的數據采集過程,進入此過程之前,系統首先查詢是否有直流采樣的要求,如果沒有,本周期的數據采樣完畢;如果有則系統進入直流采樣過程,調用直流數據采樣及存儲子程序完成此過程。由于直流信號對應渦流探頭的間隙電壓,變化緩慢,相對較長的采樣周期不會影響樣本的精度。
交直流采樣都完畢后,系統將檢查是否采用周期數已達到要求,如果沒有則開始下一周期的采樣,采樣過程和前一周期的過程一樣,否則重新設定采樣間隔時間,并允許系統數據采樣,同時上傳采集的數據給現場總線供上位機完成數據的處理分析。
從儀表的整個工作進程不難看出,對振動數據的采集采用的是整周期采樣方案。設每通道采樣點數為K=MN (M為每周期采樣點數, N為采樣周期數),本設計中,轉速信號的倍頻是通過軟件實現的,利用68HC12定時器輸入捕捉,實時記錄前后兩次鍵相脈沖到達的時間,并根據前三轉的轉速估算本次轉速,將其M等分后,用此結果刷新輸出比較定時器的計數值。開啟此定時器后,定時器輸出端口將輸出一個M倍頻的脈沖波。
4 結論
①所設計的振動測量儀表采用WorldFIP通信協議,使得振動信號可以直接引入具有WorldFIP接口的控制系統,通過相應的OPC模塊,控制系統可以使用或進一步處理振動數據,從而使振動測量可通過控制系統的軟硬件平臺實現,降低了硬設備的投入,簡化了設備管理系統的結構。
②利用微處理器內嵌模塊實現了同步整周期采樣。
③利用MCU內嵌的A/D模塊實現了直流分量的采集,減少了器件數量,降低了功耗。
④儀表中使用了內部資源豐富的68HC12微處理器,簡化了系統結構,降低了成本,也提高了可靠性。
參考文獻
[1] 楊國田,白焰.摩托羅拉68HC12系列微控制器原理、應用與開發技術[M].北京:中國電力出版社, 2003.
[2] 楊國田,張玉·振動測量中同步整周期采樣的一種實現方案[J].發電設備, 1998 (1): 25~26.
[3] 周益仁,等·現場總線控制系統的設計和開發[M].北京:國防工業出版社, 2003.
[4] 鄧艾東,許春林,張紅星·振動故障系統中的同步鍵相信號處理[J].風機技術, 2001 (5): 61~63.

評論