mini6410中斷控制器-VIC中斷控制器

S3C6410中斷控制器由兩個VIC(Vectored Interrupt Controller, ARM PrimeCell)組成和兩個TZIC’s(TrustZone Interrupt Controller SP890)。
本文引用地址:http://www.104case.com/article/201611/319034.htm兩個TZIC’s和VIC’s很好的接合起來支持64個中斷源。但是單從三星提供的硬件手冊上,很徹底了解VIC中斷的工作方式,還需要從ARM公司下載VIC控制器說明手冊,ARM PrimeCell Vectored Interrupt Controller (PL192),通讀該手冊才能幫助我們很好理解VIC中斷控制原理。
二、特點
S3C6410的向量中斷控制器的特性如下:
l 每個VIC控制器包含32向量中斷
l 固定的硬件中斷優先級別
l 可編程的中斷優先級
l 支持硬件的中斷優先級屏蔽
l 可編程的硬件的中斷優先級屏蔽
l 可產生一般中斷和快速中斷
l 可產生軟件中斷
l 原生的中斷狀態
l 中斷請求狀態
l 支持特權模式來限制訪問
如圖1-1所示。
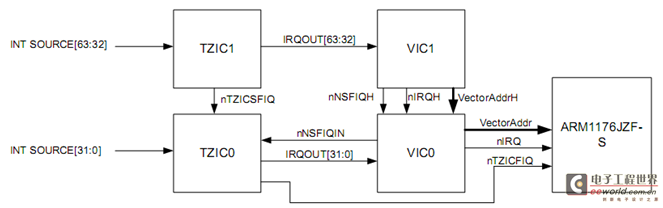
圖1-1 S3C6410的中斷控制器
三、中斷源
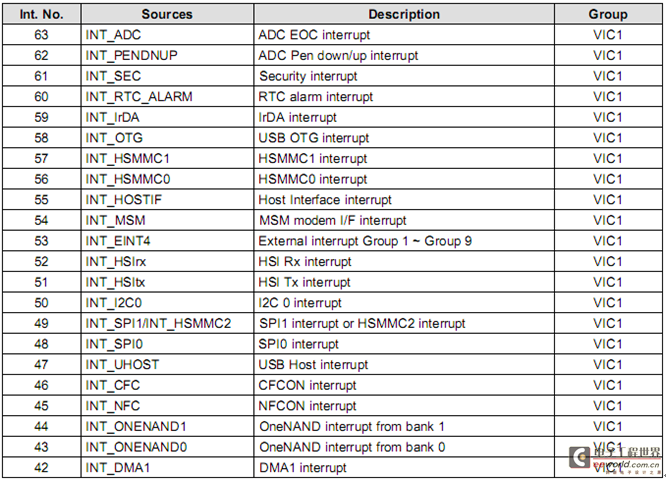
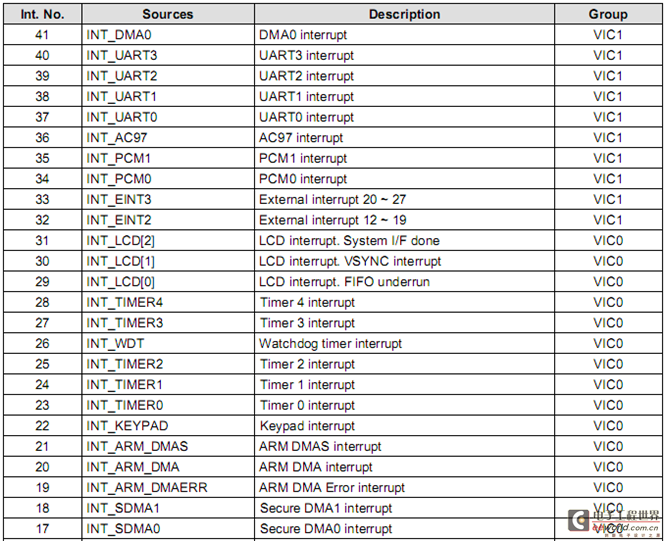
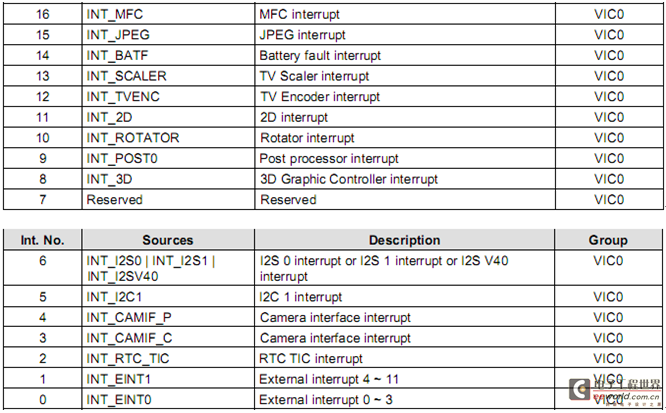
S3C6410中斷源如下表所示:
表1-1 中斷源
四、VIC寄存器
VIC0的基址是0x71200000,VIC1的基址是0x71300000
控制寄存器地址 = 偏移地址 + VICn基址
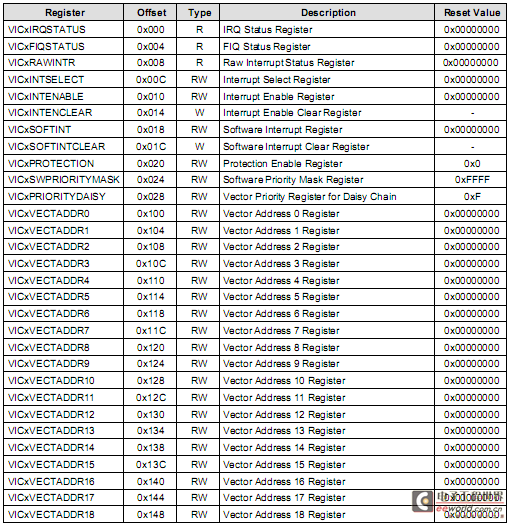
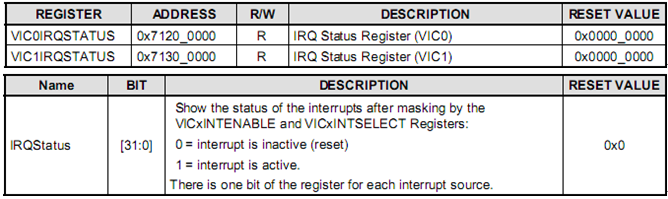
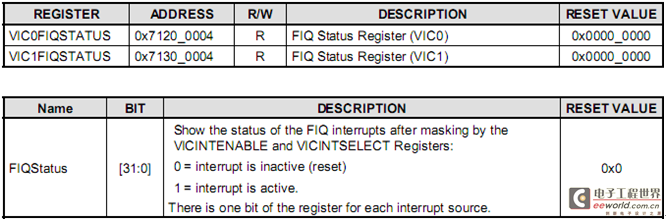
1. 中斷狀態寄存器
當使能對應中斷及選擇了其中斷類型為一般中斷,該寄存器表示對應中斷狀態,表示有無中斷產生。
2. 快速中斷狀態寄存器
當使能對應中斷及選擇了其快速中斷類型,該寄存器表示對應中斷狀態,表示有無快中斷產生。
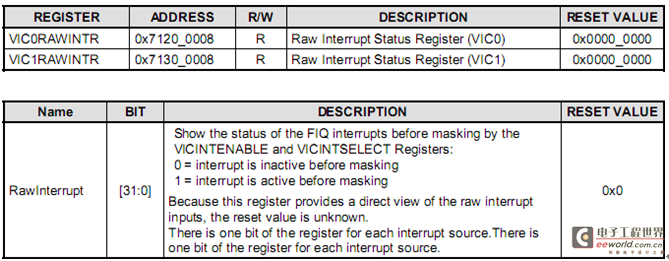
3. 中斷前狀態寄存器
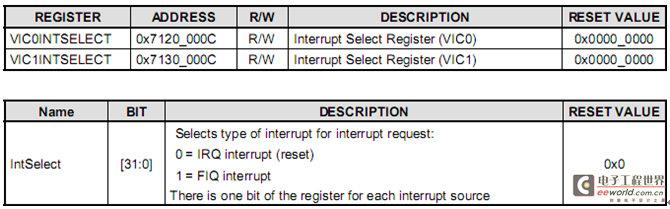
4. 中斷選擇寄存器
選擇對應的中斷信號類型為一般中斷還是快速中斷。
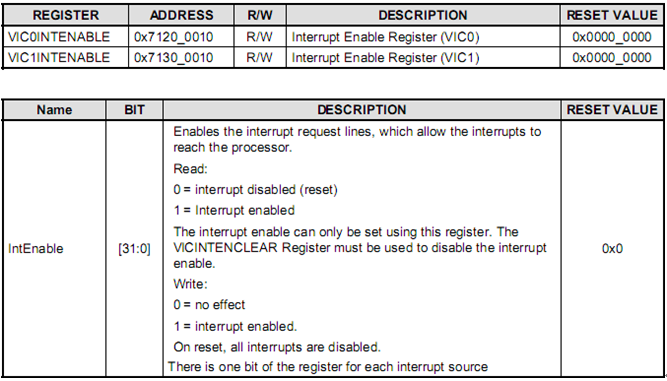
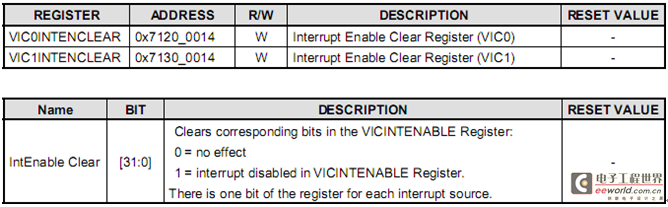
5. 中斷使能寄存器
使能對應的中斷信號,使能中斷信號只能通過該寄存器,如果禁用中斷使用VICxINTENCLEAR寄存器,在系統重置后,所有中斷都默認被禁用。
6. 中斷源禁用寄存器
該寄存器用來清除VICxINTENABLE寄存器啟用的中斷信號。
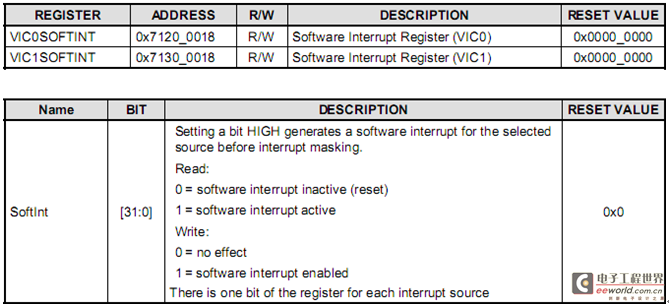
7. 軟件中斷寄存器
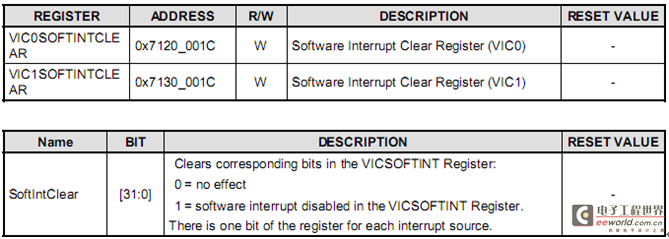
8. 軟件中斷源清除寄存器
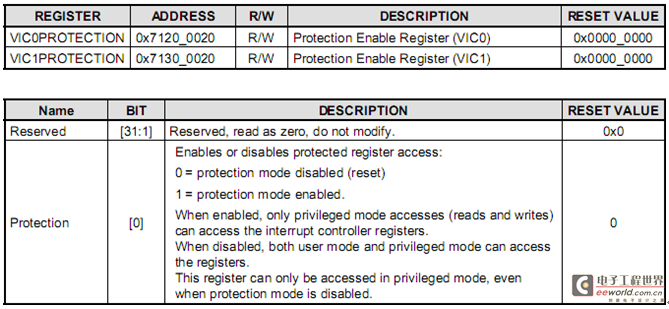
9. 保護模式使能寄存器
默認禁用保護模式,通過寫入1開啟了保護模式,只有特權模式下才可以訪問所有的中斷寄存器。
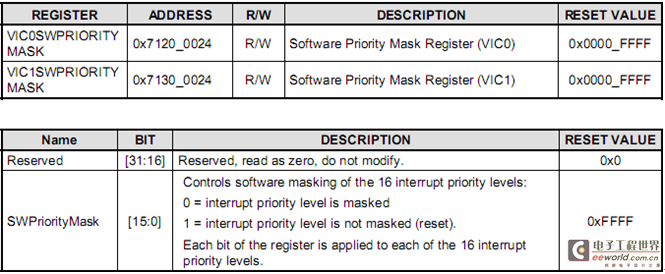
10. 軟件優先級屏蔽寄存器
是否開啟軟件中斷優先級。
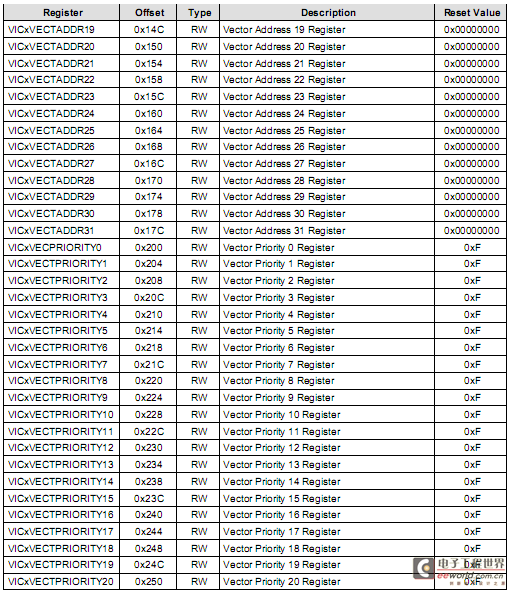
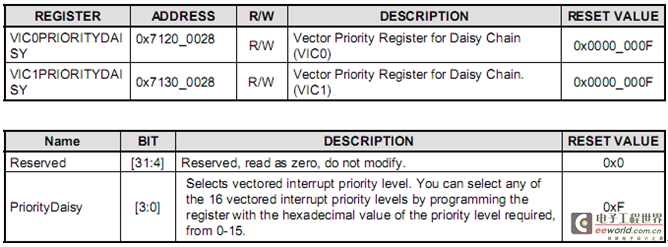
11. 鏈式向量優先級寄存器
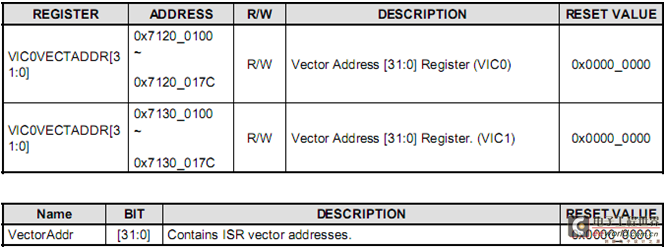
12. 向量中斷處理程序地址寄存器
每個寄存器對應一個中斷源的ISR處理程序地址。
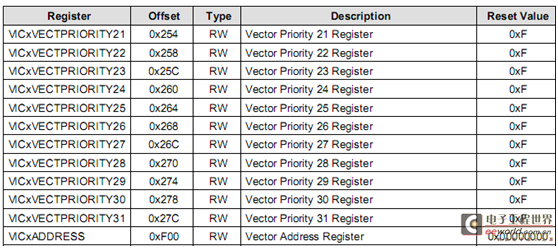
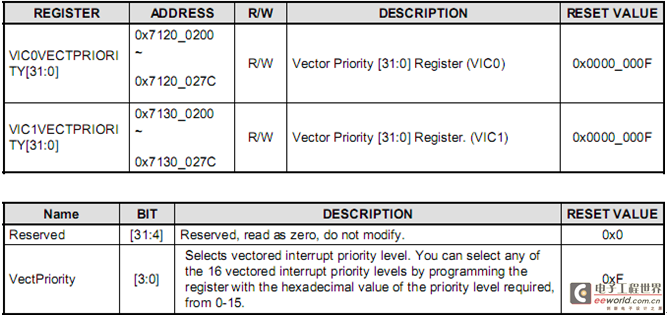
13. 向量中斷優先級寄存器
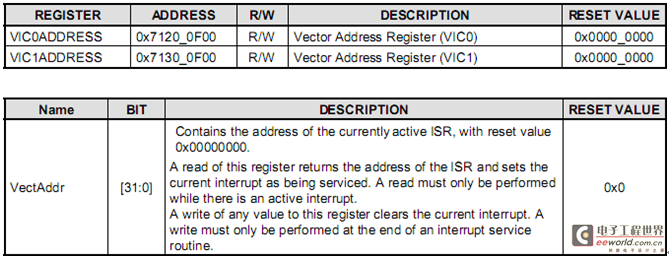
14. 向量地址寄存器
該寄存器里存放的是當前正在處理的ISR中斷服務例程的地址。當前正在處理中斷時,只能從該寄存器里讀取其值,在處理完中斷時向該寄存器里寫入任何值都可以清除其值。
二、外部中斷
1. GPIO
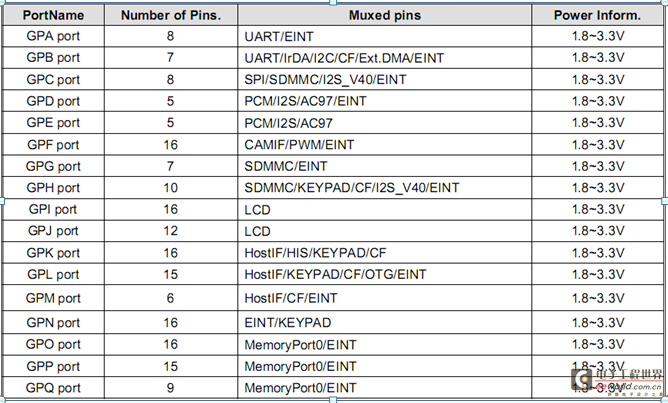
S3C6410包含有187個多功能輸入/輸出引腳。按組分類為17個端口。如下表所示。
特性
l 支持127個外部中斷
l 187個多功能引腳
l 在睡眠模式控制引腳的狀態(除了引腳GPK, GPL, GPM和GPN)
由于127個引腳都可以用來產生外部中斷,因此S3C6410為了方便管理不同的外部引腳作為中斷源,將其分為10組。
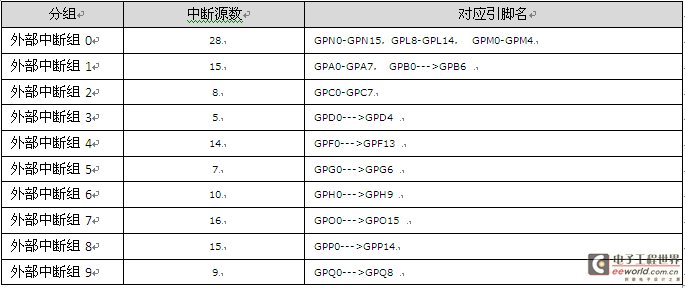
外部中斷由0~9共10組中斷信號組成。只有外部中斷組0可在系統停止或睡眠模式時進行喚醒。在空閑模式時,任何中斷信號都可以喚醒系統。
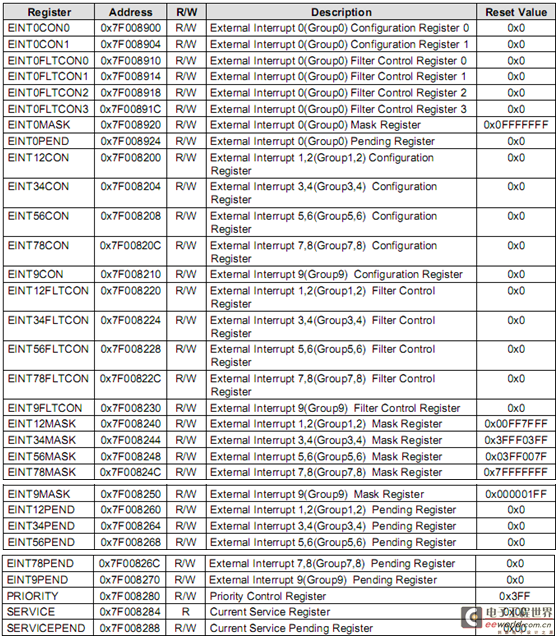
表1-2列出了外部中斷控制寄存器。外部中斷組0中的中斷信號擁有專用的引腳,相對于其它中斷組來說,該組中的每一個中斷信號可以進行詳細設置。如表1-2所示。
表1-2 外部中斷源分組
2. 外部中斷號
設置對應GPIO為外部中斷引腳功能,并設置了外部中斷的觸發方式后,當外部中斷產生時,中斷信號如果沒有被對應屏蔽寄存器屏蔽掉(外部中斷組0為EINT0MASK,其它中斷組為EINTxxMASK),會進入到外部中斷源掛起寄存器(外部中斷組0為EINT0PEND,其它中斷組為EINTxxPEND),如果這時有多個外部中斷信號產生,要進行中斷優先級的仲裁。
通過設置PRIORITY寄存器來設置10個中斷組是否進行優先級的輪轉,通常我們采用默認值即可。
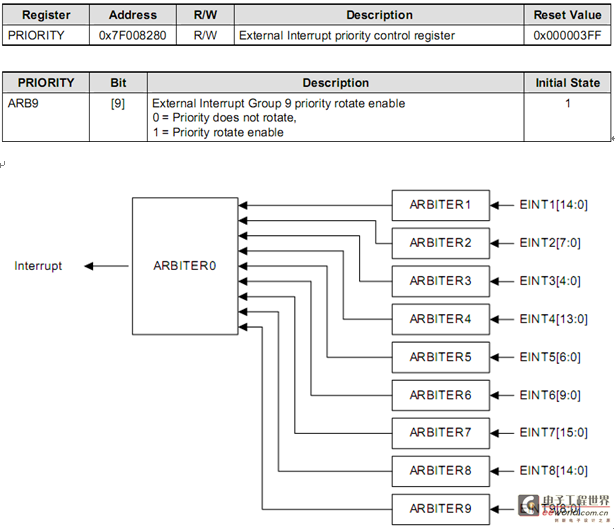
圖xxx優先級仲裁圖
經過優先級仲裁出的最高優先級中斷信號進入到VIC控制器中。由表xxx 中斷源可知, 127個外部中斷信號在VIC控制器中只有5個共享復用信號INT_EINT0~INT_EINT4與之對應。其中對應關系如下表所示。
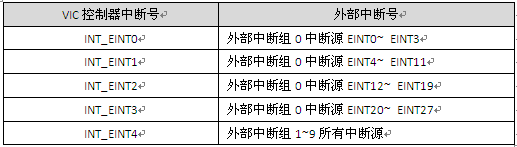
因此,如果CPU被外部中斷信號打斷后對應INT_EINT0~INT_EINT4中一位產生中斷信號,通過該信息還不足以確認中斷信號源來自哪里,還要去判斷外部中斷源掛起寄存器。
Start.S
- ;led_onMichaeltang2011-05-11
- EXPORTINIT
- AREAINIT,CODE,READONLY;該偽指令定義了一個代碼段,段名為INIT2440,屬性只讀
- ENTRY
- Reset;復位異常處理入口
- ;#################################
- ;setROMsize
- ;
- ldrr0,=0x70000000
- orrr0,r0,#0x13
- mcrp15,0,r0,c15,c2,4
- ;關閉看門狗
- IMPORTdisable_watchdog
- bldisable_watchdog
- IMPORTdisable_interrupt
- bldisable_interrupt
- IMPORTsystem_clock_init
- blsystem_clock_init
- IMPORTmem_init
- blmem_init
- ldrsp,=0x52000000
- msrcpsr_cxsf,#0xd2;切換到中斷模式下
- ldrsp,=0x51000000;設置中斷模式棧指針
- msrcpsr_cxsf,#0x13;返回管理模式
- IMPORTxmain
- blxmain
- loop
- bloop
- ;***********************************************************************
- ;中斷處理
- ;***********************************************************************
- ;K1pressirq
- EXPORTasm_handle_k1_irq
- asm_handle_k1_irq
- sublr,lr,#4;修正返回地址
- stmdbsp!,{r0-r12,lr};保存程序執行現場
- ldrlr,=isr_return;設置中斷處理程序返回地址
- IMPORT__do_k1_irq
- ldrpc,=__do_k1_irq;跳入中斷處理程序
- ;timer0pressirq
- EXPORTasm_handle_tmr0_irq
- asm_handle_tmr0_irq
- sublr,lr,#4;修正返回地址
- stmdbsp!,{r0-r12,lr};保存程序執行現場
- ldrlr,=isr_return;設置中斷處理程序返回地址
- IMPORT__do_tmr0_irq
- ldrpc,=__do_tmr0_irq;跳入中斷處理程序
- isr_return;中斷處理返回標簽
- ldmiasp!,{r0-r12,pc}^;恢復程序執行現場,返回繼續執行
- END;程序結束符
init.c
//////////////////////////////////////////////////////////////////////////////////
- #defineGPNCON(*(volatileunsignedlong*)0x7F008830)
- #defineGPNPUD(*(volatileunsignedlong*)0x7F008838)
- #defineEINT0CON0(*(volatileunsignedlong*)0x7F008900)
- #defineEINT0MASK(*(volatileunsignedlong*)0x7F008920)
- #defineVIC0IRQSTATUS(*(volatileunsignedlong*)0x71200004)
- #defineVIC0INTSELECT(*(volatileunsignedlong*)0x7120000C)
- #defineVIC1INTSELECT(*(volatileunsignedlong*)0x7130000C)
- #defineVIC0INTENABLE(*(volatileunsignedlong*)0x71200010)
- #defineVIC1INTENABLE(*(volatileunsignedlong*)0x71300010)
- #defineVIC0INTENCLEAR(*(volatileunsignedlong*)0x71200014)
- #defineVIC1INTENCLEAR(*(volatileunsignedlong*)0x71300014)
- #defineVIC0VECTADDR(*(volatileunsignedlong*)0x71200100)
- #defineINT_EINT0_BIT0
- #defineINT_TIMER0_BIT23
- //////////////////////////////////////////////////////////////////////////////////
- externvoidasm_handle_k1_irq(void);
- externvoidasm_handle_tmr0_irq(void);
- typedefvoid(fnc_t)(void);
- fnc_t**isr_array=(fnc_t**)0x71200100;
- voidirq_init()
- {
- __asm{
- mrcp15,0,r0,c1,c0,0;
- orrr0,r0,#(0x1000000);
- mcrp15,0,r0,c1,c0,0;
- }
- //configureGPN0asEINT0
- GPNCON&=(~0x2);
- GPNCON|=0x2;
- GPNPUD&=~(0x3);
- //K1,K2fallingedgetrigged
- EINT0CON0&=(~0x3);
- EINT0CON0|=0x3;
- //EnableEINT0irq
- EINT0MASK&=(~0x1);
- //SelectINT_EINT0modeasirq
- VIC0INTSELECT&=(~(1<
- //inittheisraddr
- isr_array[INT_EINT0_BIT]=(fnc_t*)asm_handle_k1_irq;
- isr_array[INT_TIMER0_BIT]=(fnc_t*)asm_handle_tmr0_irq;
- //enableINT_EINT0
- VIC0INTENABLE|=(1<
- printk("irqinitOKrn");
- }
handle_irq.c
- //====================================================
- #defineVIC0ADDRESS(*(volatileunsignedlong*)0x71200F00)
- #defineVIC1ADDRESS(*(volatileunsignedlong*)0x71300F00)
- #defineEINT0PEND(*(volatileunsignedlong*)0x7F008924)
- #defineTINT_CSTAT(*(volatileunsignedlong*)0x7F006044)
- externintprintk(char*);
- /*系統中斷處理函數*/
- #defineclear_irq()
- do{
- VIC0ADDRESS=0;
- VIC1ADDRESS=0;
- }while(0)
- void__do_k1_irq(void)
- {
- printk("do_irqrn");
- //clearK1irq
- EINT0PEND=1;
- //clearVICADDRESS
- clear_irq();
- }
- void__do_tmr0_irq(void)
- {
- printk("Timer0irqoccurrn");
- //cleartimer0irq
- TINT_CSTAT|=1<<5;
- //clearVICADDRESS
- clear_irq();
- return;
- }
main.c
- //===================================================
- #defineGPKCON(*(volatileunsignedlong*)0x7F008800)
- #defineGPKDAT(*(volatileunsignedlong*)0x7F008808)
- #defineLED_BIT(1<<5|1<<6|1<<7|1<<8)
- externvoiduart_init(void);
- externvoidirq_init(void);
- externvoidtimer0_init(void);
- externintprintk(constchar*str);
- externvoidled_run(void);
- intled_on()
- {
- GPKCON&=0xFFFF0000;//設置GPB5~8為輸出口
- GPKCON|=0x11110000;
- GPKDAT=0;//令LED亮燈
- printk("led_onnr");
- return0;
- }
- intxmain(){
- uart_init();
- printk("uart_initOKnr");
- led_on();
- irq_init();
- timer0_init();
- led_run();
- return0;
- }

評論