ARM的工作模式和寄存器

ARM架構是構建每個ARM處理器的基礎。
本文引用地址:http://www.104case.com/article/201611/317796.htm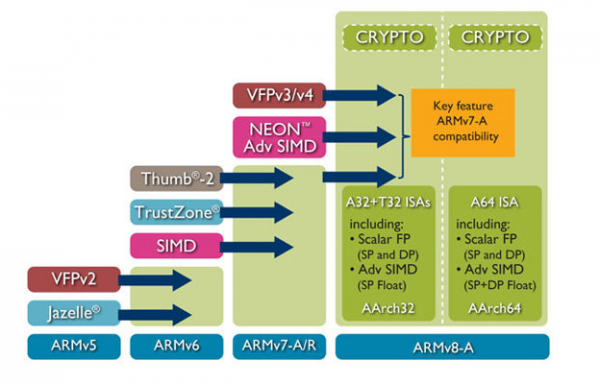
目前最新的是ARM v8架構:http://www.arm.com/zh/products/processors/instruction-set-architectures/armv8-architecture.php
ARMv8-A 將 64 位架構支持引入 ARM 架構中,其中包括:64 位通用寄存器、SP(堆棧指針)和 PC(程序計數器)64 位數據處理和擴展的虛擬尋址兩種主要執行狀態:AArch64 - 64 位執行狀態,包括該狀態的異常模型、內存模型、程序員模型和指令集支持AArch32 — 32 位執行狀態,包括該狀態的異常模型、內存模型、程序員模型和指令集支持這些執行狀態支持三個主要指令集:A32(或 ARM):32 位固定長度指令集,通過不同架構變體增強部分 32 位架構執行環境現在稱為 AArch32。T32 (Thumb) 是以 16 位固定長度指令集的形式引入的,隨后在引入 Thumb-2 技術時增強為 16 位和 32 位混合長度指令集。部分 32 位架構執行環境現在稱為 AArch32。A64:提供與 ARM 和 Thumb 指令集類似功能的 32 位固定長度指令集。隨 ARMv8-A 一起引入,它是一種 AArch64 指令集。 ARM ISA 不斷改進,以滿足前沿應用程序開發人員日益增長的要求,同時保留了必要的向后兼容性,以保護軟件開發投資。在 ARMv8-A 中,對 A32 和 T32 進行了一些增補,以保持與 A64 指令集一致。
***************************************************************************
ARM共有七種工作模式
1 用戶模式(User):用于正常執行程序
2 系統模式(Sys):運行具有特權的操作系統任務
3 快速中斷模式(FIQ):用于高速數據傳輸和通道處理
4 外部中斷模式(IRQ):用于通常的中斷處理
5 管理模式(svc):操作系統使用的保護模式
6 數據訪問終止模式(abt):當數據或指令預取終止時進入,可用于虛擬存儲及存儲保護(有待檢驗)
7 未定義指令終止模式(Und):當未定義的指令執行時進入該模式,可用于支持硬件協處理器的軟件仿真(有待檢驗)
ARM的寄存器
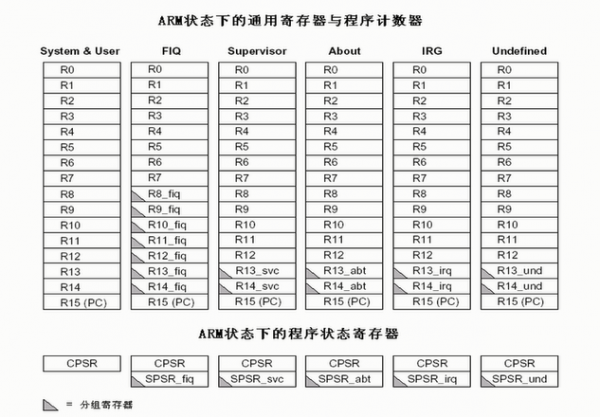
ARM共有37個寄存器,其中31個通用寄存器和6個狀態寄存器。這些寄存器不能被同時訪問,但在每種工作模式下都可訪問16個通用寄存器(R0~R15),和一個或兩個狀態寄存器(cpsr、spsr)。
31個通用寄存器可以分成三類:
1 未分組寄存器(R0~R7)
在每一種工作模式下未分組寄存器都指向同一個物理寄存器
2 分組寄存器(R8~R14)
對于分組寄存器,不同工作模式訪問的物理寄存器不同。對于R8~R12而言,每個寄存器對應兩個不同的物理寄存器,當處于快速中斷模式時訪問R8_fiq~R12_fiq,當處于非快速中斷模式時訪問R8_usr~R12_usr。
對于R13和R14寄存器來說,每個寄存器對應6個物理寄存器。其中一個是用戶模式和系統模式共用,其他5個物理寄存器對應5個異常模式,并采用R13_ /R14_ 來區分。寄存器R13在ARM指令中常用作堆棧指針,用戶也可以用其它寄存器作為堆棧指針,而在Thumb指令集中,某些指令強制要求R13作為堆棧指針。由于處理器的每種運行模式均有自己獨立的物理寄存器R13,在用戶應用程序的初始化部分,一般都要初始化每種模式下的R13,使其指向該運行模式的棧空間。這樣,當程序的運行進入異常模式時,可以將需要保護的寄存器放入R13所指向的堆棧,而當程序從異常模式返回時,則從對應的堆棧中恢復,采用這種方式可以保證異常發生后程序的正常執行。寄存器R14稱為鏈接寄存器(Link Register),當執行子程序調用指令(BL)時,R14可得到R15(程序計數器PC)的備份。在每一種運行模式下,都可用R14保存子程序的返回地址,當用BL或BLX指令調用子程序時,將PC的當前值給R14,執行完子程序后,又將R14的值回PC,即可完成子程序的調用返回。
3 程序計數器pc(R15)
寄存器R15用作程序計數器(PC),在ARM狀態下,位[1:0]為0,位[31:2]用于保存PC,在Thumb狀態下,位[0]為0,位[31:1]用于保存PC.由于ARM體系結構采用了多級流水線技術,對于ARM指令集而言,PC總是指向當前指令的下兩條指令的地址,即PC的值為當前指令的地址值加8個字節。
6個狀態寄存器:
寄存器R16用作CPSR(CurrentProgram Status Register,當前程序狀態寄存器),CPSR可在任何運行模式下被訪問,它包括條件標志位、中斷禁止位、當前處理器模式標志位,以及其他一些相關的控制和狀態位。每一種運行模式下又都有一個專用的物理狀態寄存器,稱為SPSR(Saved Program Status Register,備份的程序狀態寄存器),當異常發生時,SPSR用于保存CPSR的當前值,從異常退出時則可由SPSR來恢復CPSR。由于用戶模式和系統模式不屬于異常模式,它們沒有SPSR,當在這兩種模式下訪問SPSR,結果是未知的。
控制位:PSR的低8位(包括I,F,T和M[4:0])稱為控制位,當發生異常時這些位可以被改變,如果處理器運行特權模式,這些位也可以由程序修改.

標志位:(不可手動修改)

N,Z,C,V均為條件碼標志位,它們的內容可被算術或邏輯運算的結果所改變,并且可以決定某條指令是否被執行.
在ARM狀態下,絕大多數的指令都是有條件執行的,在Thumb狀態下,僅有分支指令是有條件執行的.
N(Negative):當用兩個補碼表示的帶符號數進行運行時,N=1表示運行結果為負,N=0表示運行結果為正或零
Z:(Zero):Z=1表示運算結果為零,Z=0表示運行結果非零
C:(Carry)加法運算:當運算結果產生了進位時C=1,否則C=0
減法運算:當運算產生了借位,C=0否則C=1
對于包含移位操作的非加/減運算指令 ,C為移出值的最后一位
對于其他的非加/減運算指令C的值通常不改變
V:(OVerflow)對于加/減法運算指令,當操作數和運算結果為二進制的被碼表示的帶符注意力時,V=1表示符號位溢出.對于其他的非加/減運算指令V的值通常不改變
->繼續更新中...

評論