單片機(jī)驅(qū)動(dòng)PS/2鍵盤

PS/2設(shè)備有主從之分,主設(shè)備采用Female插座,從設(shè)備采用Male插頭.現(xiàn)在廣泛使用的PS/2鍵盤鼠標(biāo)均在從設(shè)備方式下工作.PS/2接口的時(shí)鐘
與數(shù)據(jù)線都是集電極開路結(jié)構(gòu),必須外接上拉電阻(一般上拉電阻設(shè)置在主設(shè)備中).主從設(shè)備之間數(shù)據(jù)通信采用雙向同步串行方式傳輸,時(shí)鐘信號(hào)由從設(shè)備產(chǎn)生.
1.1 從設(shè)備到主設(shè)備的通信
當(dāng)從設(shè)備向主設(shè)備發(fā)送數(shù)據(jù)時(shí),首先檢查時(shí)鐘線,以確認(rèn)時(shí)鐘線是否為高電平.如果是高電平,從設(shè)備就可以開始傳輸數(shù)據(jù);反之,從設(shè)備要等待獲得總線的控制權(quán),才能開始傳輸數(shù)據(jù).傳輸?shù)拿恳粠?1位組成,發(fā)送時(shí)序及每一位的含義如圖2所示.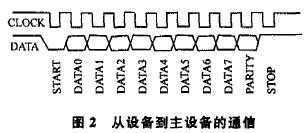
每一幀數(shù)據(jù)中開始位總是為0,數(shù)據(jù)校驗(yàn)采用奇校驗(yàn)方式,停止位始終為1.從設(shè)備到主設(shè)備通信時(shí),從設(shè)備總是在時(shí)鐘線為高時(shí)改變數(shù)據(jù)線狀態(tài),主設(shè)備在時(shí)鐘下降沿讀人數(shù)據(jù)線狀態(tài).
1.2 主設(shè)備到從設(shè)備的通信
主設(shè)備與從設(shè)備進(jìn)行通信時(shí),主設(shè)備首先將時(shí)鐘線和數(shù)據(jù)線設(shè)置為“請(qǐng)求發(fā)送”狀態(tài),具體方式為:首先下拉時(shí)鐘線至少100us抑制通信,然后下拉數(shù)據(jù)線“請(qǐng)求發(fā)送”,最后釋放時(shí)鐘線.在此過程中,從設(shè)備在不超過10us的間隔內(nèi)必須檢查這個(gè)狀態(tài),當(dāng)設(shè)備檢測到這個(gè)狀態(tài)時(shí),它將開始產(chǎn)生時(shí)鐘信號(hào).此時(shí)數(shù)據(jù)傳輸?shù)拿恳粠?2位構(gòu)成,其時(shí)序和每一位含義如圖3所示.
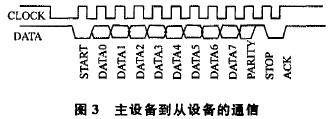
與從設(shè)備到主設(shè)備通信相比,其每幀數(shù)據(jù)多了一個(gè)ACK位.這是從設(shè)備應(yīng)答接收到字節(jié)的應(yīng)答位,由從設(shè)備通過拉低數(shù)據(jù)線產(chǎn)生,應(yīng)答位ACK總
是為0.主設(shè)備到從設(shè)備通信過程中,主設(shè)備總是在時(shí)鐘線為低電平時(shí)改變數(shù)據(jù)線的狀態(tài),從設(shè)備在時(shí)鐘上升沿讀人數(shù)據(jù)線狀態(tài).
2.1 PS/2鍵盤的編碼
目前,PC機(jī)使用的PS/2鍵盤都默認(rèn)采用第2套掃描碼集.掃描碼有兩種不同的類型:“通碼(make code)”和“斷碼(break code)”.當(dāng)一個(gè)鍵被按下或持續(xù)按住時(shí),鍵盤會(huì)將該鍵的通碼發(fā)送給主機(jī);而當(dāng)一個(gè)鍵被釋放時(shí),鍵盤會(huì)將該鍵的斷碼發(fā)送給主機(jī).根據(jù)鍵盤按鍵掃描碼的不同,可將按鍵分為3類:
第1類按鍵 通碼為一個(gè)字節(jié),斷碼為0xF0+通碼形式.如A鍵,其通碼為0x1C;斷碼為0xF0 0x1C.
第2類按鍵 通碼為兩字節(jié)0xE0+0xXX形式,斷碼為0xE0+0xF0+0xXX形式.如Right Ctrl鍵,其通碼為0xE0 0x14;斷碼為0xE0 0xF0 0x14.
第3類特殊按鍵 有兩個(gè),Print Screen鍵,其通碼為0xE0 0x12 0xE0 0x7C;斷碼為0xE0 0xF0 0x7C 0xE0 0xF0 0x12.Pause鍵,其通碼為0xE1 0x14 0x77 0xE1 0xF0 0xl4 0xF0 0x77;斷碼為空.
組合按鍵掃描碼的發(fā)送是按照按鍵發(fā)生的次序,如按下面順序按左Shift十A鍵:① 按下左Shift鍵;② 按下A鍵;③ 釋放A鍵;④ 釋放左Shift鍵,那么計(jì)算機(jī)上接收到的一串?dāng)?shù)據(jù)為0x12 0x1C 0xF0 0x1C 0xF0 0x12.
2.2 PS/2鍵盤的命令集
主機(jī)可通過向PS/2鍵盤發(fā)送命令對(duì)鍵盤進(jìn)行設(shè)置或者獲得鍵盤的狀態(tài)等操作.每發(fā)送一個(gè)字節(jié),主機(jī)都會(huì)從鍵盤獲得一個(gè)應(yīng)答0xFA(“重發(fā)
resend”和“回應(yīng)echo”命令例外).驅(qū)動(dòng)程序在鍵盤初始化過程中所用的指令:0xED,主機(jī)在該命令后跟隨發(fā)送一個(gè)參數(shù)字節(jié),用于指示鍵盤上Num Lock,Caps Lock,Scroll Lock Led的狀態(tài);0xF3,主機(jī)在這條命令后跟隨發(fā)送一個(gè)字節(jié)參數(shù)定義鍵盤機(jī)打的速率和延時(shí);0xF4,用于當(dāng)主機(jī)發(fā)送0xF5禁止鍵盤后,重新使能鍵盤.
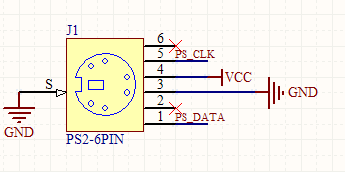
連接電路圖:
設(shè)計(jì)程序思路:
采用狀態(tài)機(jī)思想來解碼一幀數(shù)據(jù),定義四個(gè)狀態(tài):PS_IDLE 、PS_START、PS_PARITY、PS_STOP
PS_IDLE狀態(tài)接受起始碼,并判斷起始碼是否有效;PS_START狀態(tài)接受8位數(shù)據(jù);PS_PARITY狀態(tài)接受奇偶校驗(yàn)位;PS_STOP接受停止為,并奇偶校驗(yàn)數(shù)據(jù),同時(shí)處理shift按鍵以及斷碼問題;
定義結(jié)構(gòu)體
typedef struct ps2_frame
{
uchar state ;//狀態(tài)
uchar data ;//數(shù)據(jù)
uchar temp ;//用于移位
uchar parity ;//奇偶校驗(yàn)位
uchar count ;//1的位數(shù)由于奇偶校驗(yàn)
uchar ready ;//一幀數(shù)據(jù)接受完畢
uchar shift ;//shift鍵是否按下
uchar down ;//按鍵是否彈起
} ps2_frame ;
下面是程序:
頭文件
#include "main.h"
#define PS_DATA RA1
#define PS_CLK RB0
#define PS_IDLE 0x01
#define PS_START 0x02
//#define PS_DATA 0x03
#define PS_PARITY 0x04
#define PS_STOP 0x05
//#define PS_ACK
typedef struct ps2_frame
{
uchar state ;//狀態(tài)
uchar data ;//數(shù)據(jù)
uchar temp ;//用于移位
uchar parity ;//奇偶校驗(yàn)位
uchar count ;//1的位數(shù)由于奇偶校驗(yàn)
uchar ready ;//一幀數(shù)據(jù)接受完畢
uchar shift ;//shift鍵是否按下
uchar down ;//按鍵是否彈起
} ps2_frame ;
void init_ps2() ;
uchar ps_decoding(uchar data,uchar shift) ;
#endif
初始化和解碼子程序以及解碼表
#include "ps2.h"
const uchar unshifted[][2]=//shift鍵沒按下譯碼表
{
0x0e,`,
0x15,q,
0x16,1,
0x1a,z,
0x1b,s,
0x1c,a,
0x1d,w,
0x1e,2,
0x21,c,
0x22,x,
0x23,d,
0x24,e,
0x25,4,
0x26,3,
0x29, ,
0x2a,v,
0x2b,f,
0x2c,t,
0x2d,r,
0x2e,5,
0x31,n,
0x32,b,
0x33,h,
0x34,g,
0x35,y,
0x36,6,
0x39,,,
0x3a,m,
0x3b,j,
0x3c,u,
0x3d,7,
0x3e,8,
0x41,,,
0x42,k,
0x43,i,
0x44,o,
0x45,0,
0x46,9,
0x49,.,
0x4a,/,
0x4b,l,
0x4c,;,
0x4d,p,
0x4e,-,
0x52,/,
0x54,[,
0x55,=,
0x5b,],
0x5d,//,
0x61,<,
0x69,1,
0x6b,4,
0x6c,7,
0x70,0,
0x71,.,
0x72,2,
0x73,5,
0x74,6,
0x75,8,
0x79,+,
0x7a,3,
0x7b,-,
0x7c,*,
0x7d,9,
0,0
};
const uchar shifted[][2]= //shift鍵按下譯碼表
{
0x0e,~,
0x15,Q,
0x16,!,
0x1a,Z,
0x1b,S,
0x1c,A,
0x1d,W,
0x1e,@,
0x21,C,
0x22,X,
0x23,D,
0x24,E,
0x25,$,
0x26,#,
0x29, ,
0x2a,V,
0x2b,F,
0x2c,T,
0x2d,R,
0x2e,%,
0x31,N,
0x32,B,
0x33,H,
0x34,G,
0x35,Y,
0x36,^,
0x39,L,
0x3a,M,
0x3b,J,
0x3c,U,
0x3d,&,
0x3e,*,
0x41,<,
0x42,K,
0x43,I,
0x44,O,
0x45,),
0x46,(,
0x49,>,
0x4a,?,
0x4b,L,
0x4c,:,
0x4d,P,
0x4e,_,
0x52,",
0x54,{,
0x55,+,
0x5b,},
0x5d,|,
0x61,>,
0x69,1,
0x6b,4,
0x6c,7,
0x70,0,
0x71,.,
0x72,2,
0x73,5,
0x74,6,
0x75,8,
0x79,+,
0x7a,3,
0x7b,-,
0x7c,*,
0x7d,9,
0,0
};
void init_ps2()
{
ADCON1=0X07;//A口為普通IO
TRISA1=1 ;
INTCON=0 ;
INTEDG=1 ;
INTE=1 ;
PEIE=1 ;
GIE=1 ;
}
uchar ps_decoding(uchar data,uchar shift)
{
uchar temp ,i=0;
if(shift)
{
while(i!=255)
{
if(shifted[i][0]==data)
{
temp=shifted[i][1] ;
break ;
}
i++ ;
}
}
else
{
while(i!=255)
{
if(unshifted[i][0]==data)
{
temp=unshifted[i][1] ;
break ;
}
i++ ;
}
}
return temp ;
}
主程序:
#include "main.h"
#include "t232.h"
#include "ps2.h"
ps2_frame ps_frame ;
void interrupt main_int()
{
if(INTF)//下降沿觸發(fā)
{
GIE=0 ;
INTF=0 ;
switch(ps_frame.state)
{
case PS_IDLE :
if(!PS_DATA)
{
ps_frame.ready=0 ;
ps_frame.state=PS_START ;
ps_frame.temp = 1 ;
ps_frame.count = 0 ;
ps_frame.data=0 ;
}
else
ps_frame.state=PS_IDLE ;
break ;
case PS_START :
if(PS_DATA)
{
ps_frame.data=ps_frame.data|ps_frame.temp ;
ps_frame.count++ ;
}
ps_frame.temp=ps_frame.temp<<1 ;
if(!ps_frame.temp)
ps_frame.state=PS_PARITY ;
break ;
case PS_PARITY :
ps_frame.parity=PS_DATA ;
ps_frame.state=PS_STOP ;
break ;
case PS_STOP :
if(PS_DATA)
{
if(ps_frame.parity)
{
if(ps_frame.count%2==0)
ps_frame.ready=1 ;
}
else
{
if(ps_frame.count%2==1)
ps_frame.ready=1 ;
}
switch(ps_frame.data)//處理通碼和斷碼
{
case 0xF0 :
ps_frame.down=0 ;
ps_frame.ready=0 ;
break ;
case 0x12 :
if(!ps_frame.down)
ps_frame.shift=0 ;
else
ps_frame.shift=1 ;
ps_frame.ready=0 ;
break ;
case 0x59 :
if(!ps_frame.down)
ps_frame.shift=0 ;
else
ps_frame.shift=1 ;
ps_frame.ready=0 ;
break ;
default :
if(!ps_frame.down)
{
ps_frame.ready=0 ;
ps_frame.down=1 ;
}
break ;
}
}
ps_frame.state = PS_IDLE ;
break ;
default :
break ;
}
}
GIE=1 ;
}
void init_all()
{
init_232() ;
init_ps2() ;
ps_frame.state = PS_IDLE ;
ps_frame.shift=0 ;
ps_frame.down = 0 ;
}
void main()
{
const char str[]= "hello world !" ;
uchar temp ;
init_all() ;
send_str(str) ;//測試串口
while(1)
{
if(ps_frame.ready)
{
temp=ps_decoding(ps_frame.data,ps_frame.shift) ;
put_char(temp) ;
ps_frame.ready=0 ;
}
}
}

評(píng)論