stm32F407之USART6的DMA工作方式

力求簡潔,stm32的DMA就不介紹了,不了解的可以搜索一下。這里重點介紹一下DMA的外設地址如何確定,這個是網上很少涉及但是很重要的一塊,如果不清楚如何確定外設寄存器地址就無法進行DMA功能,這里以stm32F407的USART6為例介紹,參考手冊為“RM0090 Reference manual”。
本文引用地址:http://www.104case.com/article/201611/317475.htm在進行DMA參數配置時有這樣一項 DMA_InitStructure.DMA_PeripheralBaseAddr = ?;這句是要確定Memory與Peripheral數據傳輸時的外設數據地址,因為這里我們用到的是USART6從Memory的數組中取出數據并發送給上位機,所以這里用到的外設地址其實是USART6的數據寄存器地址 USART6_DR,關鍵是確定他的地址。好了我們現在打開參考手冊,找到“Memory Map”一項,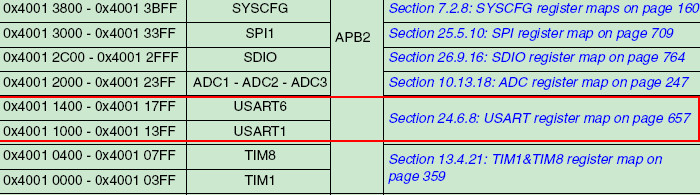
打開可以看到USART6的基地址為0x4001 1400,好了,接著點擊后面的藍色連接
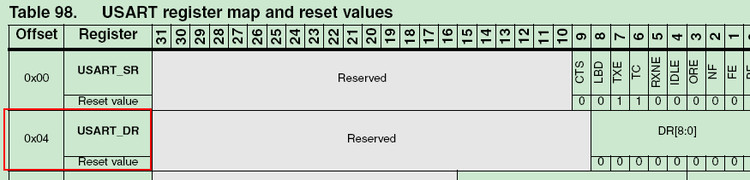
看到USART_DR的OFFSET地址為0x04,則USART6的真實地址為 0x4001 1400+0x04 = 0x4001 1404;這樣便確定了USART6_DR的地址。其他的就好說了,代碼如下
/************************************************************
Copyright (C), 2012-2022, yin.
FileName: main.c
Author: ycw Version : 1.0 Date: 2012.04.27
Description: USART6 DMA SendData
Version: V3.0
Function List:USART6 DMA SendData
History: V1.0
#include
/*定義USART6的數據寄存器地址,DMA功能要用到外設的數據地址
*USART6的數據地址為外設基地址+偏移地址,基地址在RM0090 Reference
*manual(參考手冊)的地址映射表里(P50),為0x40011400,USART_DR
*偏移地址在P657,為0x04,故實際地址為0x40011400+0x04 = 0x40011404 */
#define USART6_DR_Addr 0x40011404
/*定義一個數組,DMA工作時從內存取數組的數據傳給USART6 */
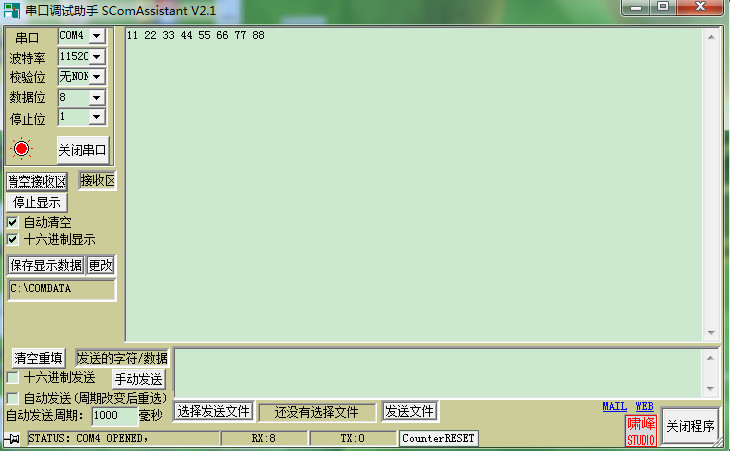
uint8_t Buffer[] = {0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88};
uint8_t Buffer2[] = {0x99,0x6f};
void GPIO_Config(void);
void USART_Config(void);
void USART6_Puts(char * str);
void DMA_Config(void);
void NVIC_Config(void);
void Delay(uint32_t nCount);
main()
{
/*在主函數main之前通過調用啟動代碼運行了SystemInit函數,而這個函數位于system_stm32f4xx.c”。
程序運行起始于啟動文件的第175行(LDR R0, =SystemInit)。sys時鐘為HSE頻率/PLL_M*PLL_N/PLL_P,
定義HSE為25M,則sys時鐘頻率為168M */
GPIO_Config();
USART_Config();
DMA_Config();
NVIC_Config();
GPIO_SetBits(GPIOG, GPIO_Pin_6); //關閉LED
while (1)
{
USART_DMACmd(USART6, USART_DMAReq_Tx, ENABLE); //使能USART6的發送數據DMA請求,至此USART6與DMA開始工作
/*因為DMA工作是獨立于CPU之外的,所以在DMA工作的同時CPU可以做其他事
*我們等到DMA傳輸完畢后產生一個狀態指示,即點亮一個LED */
/*查詢模式
while (DMA_GetFlagStatus(DMA2_Stream6, DMA_FLAG_TCIF6) == RESET)
{
GPIO_ResetBits(GPIOG,GPIO_Pin_6); //點亮LED
}
*/
//DMA_Cmd(DMA2_Stream6, DISABLE); //DMA傳輸完畢后會自動關閉通道,這句可以不寫
}
}
/*************************************************
Function: void GPIO_Config(void)
Description: GPIO配置函數
Input: 無
Output:無
Return:無
*************************************************/
void GPIO_Config(void)
{
/*定義了一個GPIO_InitStructure的結構體,方便一下使用 */
GPIO_InitTypeDef GPIO_InitStructure;
/* 初始化GPIOG時鐘*/
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG , ENABLE);//使能GPIOG時鐘(時鐘結構參見“stm32圖解.pdf”)
/*僅設置結構體中的部分成員:這種情況下,用戶應當首先調用函數PPP_SturcInit(..)
*來初始化變量PPP_InitStructure,然后再修改其中需要修改的成員。這樣可以保證其他
*成員的值(多為缺省值)被正確填入。
*/
GPIO_StructInit(&GPIO_InitStructure);
/* 初始化GPIOG的Pin_6為推挽輸出*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //指定第六引腳
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //模式為輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //頻率為快速
GPIO_Init(GPIOG, &GPIO_InitStructure); //調用IO初始化函數
}
/*************************************************
Function: void USART_Config(void)
Description: USART配置函數
Input: 無
Output:無
Return:無
*************************************************/
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
USART_ClockInitTypeDef USART_ClockInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART6, ENABLE); //開啟USART6時鐘
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE); //開啟GPIOC時鐘
GPIO_PinAFConfig(GPIOC, GPIO_PinSource6, GPIO_AF_USART6);//這相當于M3的開啟復用時鐘?只配置復用的引腳,
GPIO_PinAFConfig(GPIOC, GPIO_PinSource7, GPIO_AF_USART6);//
/*配置GPIOC*/
GPIO_StructInit(&GPIO_InitStructure); //缺省值填入
/*配置GPIOC_Pin6為TX輸出*/
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF; //設置為復用,必須為AF,OUT不行
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
/*配置GPIOC_Pin7為RX輸入*/
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF; //這也必須為復用,與M3不同!
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
/*IO引腳復用功能設置,與之前版本不同*/
/*配置USART6*/
USART_StructInit(&USART_InitStructure);
USART_InitStructure.USART_BaudRate =115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART6, &USART_InitStructure);
USART_ClockStructInit(&USART_ClockInitStruct); //之前沒有填入缺省值,是不行的
USART_ClockInit(USART6, &USART_ClockInitStruct);
USART_ITConfig(USART6, USART_IT_RXNE, ENABLE); //使能 USART6中斷
USART_Cmd(USART6, ENABLE); //使能 USART6
//USART_DMACmd(USART6, USART_DMAReq_Tx, ENABLE); //使能USART6的發送數據DMA請求,至此USART6與DMA開始工作,可以寫在主函數里隨時工作
}
void NVIC_Config()
{
/*USART6中斷配置*/
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); //嵌套優先級分組為 1
NVIC_InitStructure.NVIC_IRQChannel = USART6_IRQn; //嵌套通道為USART6_IRQn
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //搶占優先級為 0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //響應優先級為 0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //通道中斷使能
NVIC_Init(&NVIC_InitStructure);
/*DMA中斷配置*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); //嵌套優先級分組為 1
NVIC_InitStructure.NVIC_IRQChannel = DMA2_Stream6_IRQn; //嵌套通道為DMA2_Stream6_IRQn
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //搶占優先級為 1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //響應優先級為 0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //通道中斷使能
NVIC_Init(&NVIC_InitStructure);
}
/*************************************************
Function: void USART6_Puts(char * str)
Description: USART6發送數據
Input: 待發送數據指針
Output:無
Return:無
*************************************************/
void USART6_Puts(char * str)
{
while (*str)
{
USART_SendData(USART6, *str++);
/* Loop until the end of transmission */
while (USART_GetFlagStatus(USART6, USART_FLAG_TXE) == RESET); //詳見英文參考的521頁,當TXE被置起時,一幀數據傳輸完成
}
}
/*************************************************
Function: void DMA_Config(void)
Description: DMA配置函數
Input: 延時的時間
Output:無
Return:無
*************************************************/
void DMA_Config(void)
{
DMA_InitTypeDef DMA_InitStructure;
/*首先開DMA2時鐘,由407參考手冊-RM0090-Reference manual
165頁可知,UASRT6與DMA2映射,而且DMA2掛載在AHB1時鐘總線上*/
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA2, ENABLE);
/*由RM0090-Reference manual第165頁映射表可知,USART6映射在
Channel_5的Stream6和Stream7上,在這里可以選擇Stream6 */
DMA_DeInit(DMA2_Stream6);
DMA_StructInit( &DMA_InitStructure);
DMA_InitStructure.DMA_Channel = DMA_Channel_5; //選擇Channel_5
DMA_InitStructure.DMA_PeripheralBaseAddr = USART6_DR_Addr; //數據傳輸的外設首地址,詳解見上
DMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t)Buffer; //自己定義待發送數組的首地址,要強制轉換為32位
DMA_InitStructure.DMA_DIR = DMA_DIR_MemoryToPeripheral; //數據傳輸方向選擇為內存->外設
DMA_InitStructure.DMA_BufferSize = 8; //傳輸數據大小為8,單位由以下確定,大小要配合定義的數組類型和外設數據類型
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外設地址寄存器自動增加禁止,因為這里只用到了DR數據寄存器
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //內存地址自增允許,因為要讀取一個數組
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; //外設的數據大小,因為USART6_DR數據寄存器為8為,故選Byte
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; //這里也選Byte
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; //DMA傳輸模式為Normal,如果為Circular,將會循環傳輸
DMA_InitStructure.DMA_Priority = DMA_Priority_High; //優先級為High
/*雙緩沖模式,在DMA_Init之前調用在Circular模式有效,會強制Circular,
*不支持Memory toMemory,(uint32_t)Buffer2為DMA_Memory_1,DMA先將Buffer
*中的數據發送完畢后在發送Buffer2的數據,當然順序可以改變
DMA_DoubleBufferModeConfig(DMA2_Stream6, (uint32_t)Buffer2, DMA_Memory_0);
DMA_DoubleBufferModeCmd(DMA2_Stream6, ENABLE);
*/
DMA_Init(DMA2_Stream6, &DMA_InitStructure);
DMA_Cmd(DMA2_Stream6, ENABLE);//使能DMA2_Stream6通道
/*DMA中斷開*/
DMA_ITConfig(DMA2_Stream6, DMA_IT_TC, ENABLE);
}
/*************************************************
Function: void Delay(uint32_t nCount)
Description: 延時函數
Input: 延時的時間
Output:無
Return:無
*************************************************/
void Delay(uint32_t nCount)
{
while (nCount--);
}
中斷服務函數:
/**名稱:DMA中斷服務程序
*作用:DMA數據完全完成后產生中斷,并點亮LED
*/
void DMA2_Stream6_IRQHandler(void)
{
if (DMA_GetITStatus(DMA2_Stream6, DMA_IT_TCIF6) != RESET) //判斷為接收中斷
{
DMA_ClearITPendingBit(DMA2_Stream6, DMA_IT_TCIF6);
GPIO_ResetBits(GPIOG, GPIO_Pin_6); //點亮LED,起到中斷指示作用
}
}
調試結果如下:

評論