ARM移植之BootLoader(2)

3.1硬件設(shè)備初始化
基本的硬件初始化工作包括:
·屏蔽所有的中斷;
·設(shè)置CPU的速度和時鐘頻率;
·RAM初始化;
·初始化LED
ARM的中斷向量表設(shè)置在0地址開始的8個字空間中,如下表:
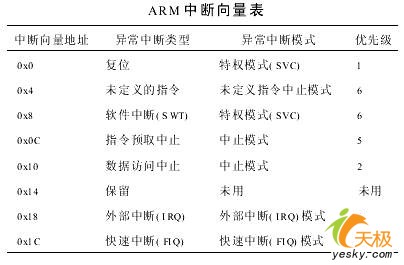 |
每當其中的某個異常發(fā)生后即將PC值置到相應(yīng)的中斷向量處,每個中斷向量處放置一個跳轉(zhuǎn)指令到相應(yīng)的中斷服務(wù)程序去進行處理,中斷向量表的程序如下:
| @ 0x00: Reset b Reset @ 0x04: Undefined instruction exception UndefEntryPoint: b HandleUndef @ 0x08: Software interrupt exception SWIEntryPoint: b HandleSWI @ 0x0c: Prefetch Abort (Instruction Fetch Memory Abort) PrefetchAbortEnteryPoint: b HandlePrefetchAbort @ 0x10: Data Access Memory Abort DataAbortEntryPoint: b HandleDataAbort @ 0x14: Not used NotUsedEntryPoint: b HandleNotUsed @ 0x18: IRQ(Interrupt Request) exception IRQEntryPoint: b HandleIRQ @ 0x1c: FIQ(Fast Interrupt Request) exception FIQEntryPoint: b HandleFIQ |
復(fù)位時關(guān)閉看門狗定時器、屏蔽所有中斷:
| Reset: @ disable watch dog timer mov r1, #0x53000000 mov r2, #0x0 str r2, [r1] @ disable all interrupts mov r1, #INT_CTL_BASE mov r2, #0xffffffff str r2, [r1, #oINTMSK] ldr r2, =0x7ff str r2, [r1, #oINTSUBMSK] |
設(shè)置系統(tǒng)時鐘:
| @init clk @ 1:2:4 mov r1, #CLK_CTL_BASE mov r2, #0x3 str r2, [r1, #oCLKDIVN] mrc p15, 0, r1, c1, c0, 0 @ read ctrl register orr r1, r1, #0xc0000000 @ Asynchronous mcr p15, 0, r1, c1, c0, 0 @ write ctrl register @ now, CPU clock is 200 Mhz mov r1, #CLK_CTL_BASE ldr r2, mpll_200mhz str r2, [r1, #oMPLLCON] |
點亮所有的用戶LED:
| @ All LED on mov r1, #GPIO_CTL_BASE add r1, r1, #oGPIO_F ldr r2,=0x55aa str r2, [r1, #oGPIO_CON] mov r2, #0xff str r2, [r1, #oGPIO_UP] mov r2, #0x00 str r2, [r1, #oGPIO_DAT] |
設(shè)置(初始化)內(nèi)存映射:
| ENTRY(memsetup) @ initialise the static memory @ set memory control registers mov r1, #MEM_CTL_BASE adrl r2, mem_cfg_val add r3, r1, #52 1: ldr r4, [r2], #4 str r4, [r1], #4 cmp r1, r3 bne 1b mov pc, lr |
設(shè)置(初始化)UART:
| @ set GPIO for UART mov r1, #GPIO_CTL_BASE add r1, r1, #oGPIO_H ldr r2, gpio_con_uart str r2, [r1, #oGPIO_CON] ldr r2, gpio_up_uart str r2, [r1, #oGPIO_UP] bl InitUART @ Initialize UART @ @ r0 = number of UART port InitUART: ldr r1, SerBase mov r2, #0x0 str r2, [r1, #oUFCON] str r2, [r1, #oUMCON] mov r2, #0x3 str r2, [r1, #oULCON] ldr r2, =0x245 str r2, [r1, #oUCON] #define UART_BRD ((50000000 / (UART_BAUD_RATE * 16)) - 1) mov r2, #UART_BRD str r2, [r1, #oUBRDIV] mov r3, #100 mov r2, #0x0 1: sub r3, r3, #0x1 tst r2, r3 bne 1b #if 0 mov r2, #U str r2, [r1, #oUTXHL] 1: ldr r3, [r1, #oUTRSTAT] and r3, r3, #UTRSTAT_TX_EMPTY tst r3, #UTRSTAT_TX_EMPTY bne 1b mov r2, #0 str r2, [r1, #oUTXHL] 1: ldr r3, [r1, #oUTRSTAT] and r3, r3, #UTRSTAT_TX_EMPTY tst r3, #UTRSTAT_TX_EMPTY bne 1b #endif mov pc, lr |
此外,vivi還提供了幾個匯編情況下通過串口打印字符的函數(shù)PrintChar、PrintWord和PrintHexWord:
| @ PrintChar : prints the character in R0 @ r0 contains the character @ r1 contains base of serial port @ writes ro with XXX, modifies r0,r1,r2 @ TODO : write ro with XXX reg to error handling PrintChar: TXBusy: ldr r2, [r1, #oUTRSTAT] and r2, r2, #UTRSTAT_TX_EMPTY tst r2, #UTRSTAT_TX_EMPTY beq TXBusy str r0, [r1, #oUTXHL] mov pc, lr @ PrintWord : prints the 4 characters in R0 @ r0 contains the binary word @ r1 contains the base of the serial port @ writes ro with XXX, modifies r0,r1,r2 @ TODO : write ro with XXX reg to error handling PrintWord: mov r3, r0 mov r4, lr bl PrintChar mov r0, r3, LSR #8 /* shift word right 8 bits */ bl PrintChar mov r0, r3, LSR #16 /* shift word right 16 bits */ bl PrintChar mov r0, r3, LSR #24 /* shift word right 24 bits */ bl PrintChar mov r0, #r bl PrintChar mov r0, #n bl PrintChar mov pc, r4 @ PrintHexWord : prints the 4 bytes in R0 as 8 hex ascii characters @ followed by a newline @ r0 contains the binary word @ r1 contains the base of the serial port @ writes ro with XXX, modifies r0,r1,r2 @ TODO : write ro with XXX reg to error handling PrintHexWord: mov r4, lr mov r3, r0 mov r0, r3, LSR #28 bl PrintHexNibble mov r0, r3, LSR #24 bl PrintHexNibble mov r0, r3, LSR #20 bl PrintHexNibble mov r0, r3, LSR #16 bl PrintHexNibble mov r0, r3, LSR #12 bl PrintHexNibble mov r0, r3, LSR #8 bl PrintHexNibble mov r0, r3, LSR #4 bl PrintHexNibble mov r0, r3 bl PrintHexNibble mov r0, #r bl PrintChar mov r0, #n bl PrintChar mov pc, r4 |

評論