單片機實現段距離無線傳輸

主要器件:
1、單片機端:AT89C52單片機芯片,用于控制無線模塊的發射和接受;PTR2000無線數據傳輸模塊,使用了433MHz IGM頻段,是真正的單片UHF無線收發一體芯片,可以和單片機的串口直接相連。
2、PC端:PTR2000無線數據傳輸模塊;TTL電平轉換RS-232電平芯片MAX202。
試驗流程圖: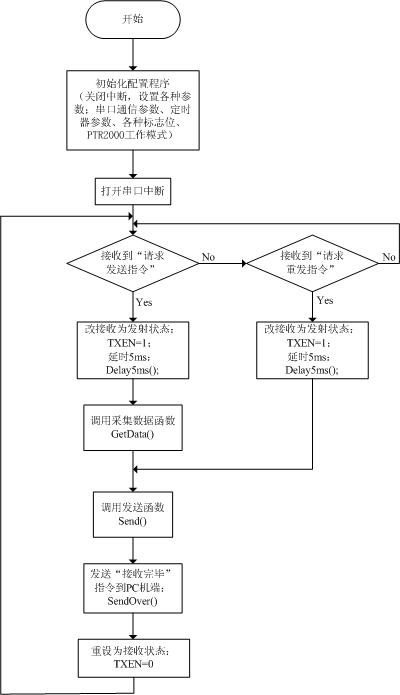
試驗電路圖:
單片機端: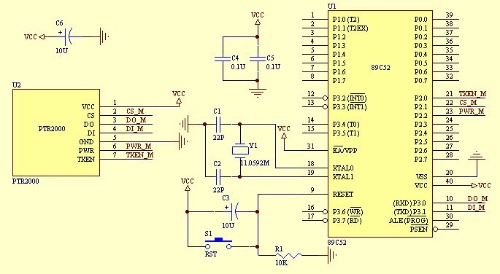
PC端: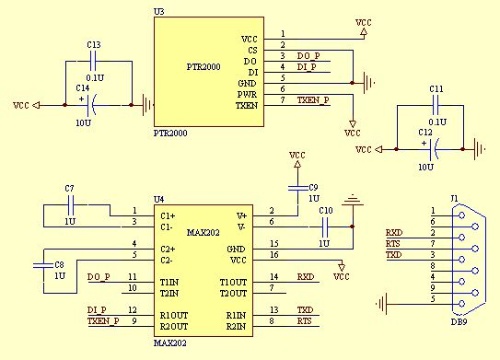
試驗程序代碼:
//wireless.h程序
#ifndef_WIRELESS_H//防止wireless.h被重復引用
#define_WIRELESS_H
#include
#include
#define uchar unsigned char
#define uint unsigned int
#define REQ_SEND0x33
#define REQ_RESEND0x66
#define SEND_OVER0x99
//為簡化起見,假設了7位固定的采集數據
#define DATA00x10
#define DATA10x20
#define DATA20x30
#define DATA30x40
#define DATA40x50
#define DATA50x60
#define DATA60x70
sbit TXEN = P2^0;
sbit CS = P2^1;
sbit PWR = P2^2;
void ClearT_buf();//清除t_buf函數
void ClearR_buf();//清除r_buf函數
void Delay5ms();//延時5ms
void GetData();//采集數據
void Send();//采集并發送函數
void SendOver();//通知PC機發送結束函數
xdata uchar Flag_StartRec = 0 ;//開始接受數據標志位
xdata uchar Flag_ReqSend = 0 ;//請求發送標志位
xdata uchar Flag_ReqReSend = 0 ;//請求重發標志位
xdata uchar Flag_Delay5ms = 1 ;//延時5ms標志
xdata uchar Data[7];//采集的7個字節數據
xdata uchar tCount = 0 ;
xdata uchar t_buf[11];// 1開始字節"$",1長度字節LEN,
// 7字節數據,1校驗和字節,
// 1結束字節"*"
xdata uchar rCount = 0 ;
xdata uchar r_buf[5];// 1開始字節"$",1長度字節LEN,
// 1字節指令,1校驗和字節,
// 1結束字節"*"
#endif
//wireless.c程序
#include "wireless.h"
/*定時器0中斷服務子程序*/
void timer() interrupt 1 using 2
{
Flag_Delay5ms = 0;
TH0 = -5000/256;
TL0 = -5000%256;
}
void main(void)
{
ClearT_buf();
ClearR_buf();
TXEN = 0;//初始為接收狀態
PWR = 1;//正常工作模式
CS = 0;//選擇頻道0
EA=0;
/* 11.0592MHz下,設置串行口9600波特率,工作方式1
8位數據位,1位停止位,無奇偶校驗,*/
TMOD = 0x21;//定時器1工作模式1,定時器0工作模式2
SCON = 0x50;//串行口工作方式1,REN=1
PCON = 0x00;//SMOD=0
TL1 = 0xfd;
TH1 = 0xfd;
TR1=1;//定時器1開始計時
PT0 = 1;//定時器0高優先級
TH0 = -5000/256;//5ms
TL0 = -5000%256;
IE = 0x90;//EA=1,ES=1:打開串口中斷
while (1)
{
if (Flag_ReqSend)//收到“請求發送”指令
{
TXEN = 1;//改變為發射狀態
Delay5ms();//延時5ms
GetData();//采集數據
Send();//發送
Flag_ReqSend = 0;
SendOver();//通知PC機發送結束
TXEN = 0;//重設為接收狀態
}
else if (Flag_ReqReSend)//收到“請求重發”指令
{
TXEN = 1;//改變為發射狀態
Delay5ms();//延時5ms
Send();//重發
Flag_ReqReSend = 0;
SendOver();//通知PC機發送結束
TXEN = 0;//重設為接收狀態
}
}
}
接上篇程序:
/*串口中斷服務子程序*/
void serial ( ) interrupt 4 using 1
{
RI = 0 ;
/*判斷是否收到字符$,其數值為0x24,置開始接收標志位*/
if ((!Flag_StartRec) && (SBUF == 0x24))
{
Flag_StartRec = 1;
}
if(Flag_StartRec)
{
if(rCount <5)
{
r_buf[rCount] = SBUF;
rCount ++;
}
/*判斷是否收到字符*,其數值為0x2A,根據接收的指令設置相應標志位*/
if ((r_buf[rCount -1] == 0x2A)||(rCount== 5))
{
rCount= 0;
Flag_StartRec = 0;
if (r_buf[2] == REQ_SEND)//收到“請求發送”指令
{
Flag_ReqSend = 1;
}
if (r_buf[2] == REQ_RESEND)//收到“請求重發”指令
{
Flag_ReqReSend = 1;
}
}
else
ClearR_buf();
}
}
void ClearT_buf(void)
{
uchar xdata k ;
for (k=0;k++;k<11)
{
t_buf[k] = 0;
}
}
void ClearR_buf(void)
{
uchar xdata k ;
for (k=0;k++;k<5)
{
r_buf[k] = 0;
}
}
void Delay5ms(void)
{
TR0=1;
ET0=1;
while( Flag_Delay5ms);
ET0 = 0;
TR0 = 0;
Flag_Delay5ms = 1;
}
//采集數據函數經過簡化處理,取固定的7個字節數據
void GetData(void)
{
Data[0]=DATA0;
Data[1]=DATA1;
Data[2]=DATA2;
Data[3]=DATA3;
Data[4]=DATA4;
Data[5]=DATA5;
Data[6]=DATA6;
}
//單片機端發送數據函數
void Send(void)
{
uchar xdata j = 0;
uchar xdata len = 0;
uchar xdata CheckSum = 0 ;
t_buf[0]=0x24;//起始位
t_buf[1]=0x07;//7個數據字節
len=t_buf[1];
CheckSum = CheckSum + len;
for ( j=0;j++;j { t_buf[j+2] = Data[j]; CheckSum = CheckSum + t_buf[j+2]; } t_buf[9] = CheckSum;//校驗和字節 t_buf[10] = 0x2A;//停止位 for (j=0;j++;j<11) { TI =0 ; SBUF = t_buf[j]; while ( TI ==0 ); TI =0 ; } } //通知PC機端發送結束函數 void SendOver(void) { TI =0 ; SBUF = 0x24; while ( TI ==0 ); TI =0 ; SBUF = 0x01; while ( TI ==0 ); TI =0 ; SBUF = SEND_OVER;//通知PC機端“發送結束” while ( TI ==0 ); TI =0 ; SBUF = 0x99;//校驗和字節 while ( TI ==0 ); TI =0 ; SBUF = 0x2A; while ( TI ==0 ); TI =0 ; }

評論