單片機超聲波傳感器測量距離

設計一個超聲波測距器,可以應用于汽車倒車、建筑施工工地以及一些工業現場的位置監控,也可用于如液位、井深、管道長度的測量等場合。要求測量范圍在0.10-3.00m,測量精度1cm,測量時與被測物體無直接接觸,能夠清晰穩定地顯示測量結果。
本文引用地址:http://www.104case.com/article/201611/315675.htm二、設計思路
超聲波傳感器及其測距原理
超聲波是指頻率高于20KHz的機械波。為了以超聲波作為檢測手段,必須產生超生波和接收超聲波。完成這種功能的裝置就是超聲波傳感器,習慣上稱為超聲波換能器或超聲波探頭。超聲波傳感器有發送器和接收器,但一個超聲波傳感器也可具有發送和接收聲波的雙重作用。超聲波傳感器是利用壓電效應的原理將電能和超聲波相互轉化,即在發射超聲波的時候,將電能轉換,發射超聲波;而在收到回波的時候,則將超聲振動轉換成電信號。
超聲波測距的原理一般采用渡越時間法TOF(timeofflight)。首先測出超聲波從發射到遇到障礙物返回所經歷的時間,再乘以超聲波的速度就得到二倍的聲源與障礙物之間的距離
測量距離的方法有很多種,短距離的可以用尺,遠距離的有激光測距等,超聲波測距適用于高精度的中長距離測量。因為超聲波在標準空氣中的傳播速度為331.45米/秒,由單片機負責計時,單片機使用12.0M晶振,所以此系統的測量精度理論上可以達到毫米級。
由于超聲波指向性強,能量消耗緩慢,在介質中傳播距離遠,因而超聲波可以用于距離的測量。利用超聲波檢測距離,設計比較方便,計算處理也較簡單,并且在測量精度方面也能達到要求。
超聲波發生器可以分為兩類:一類是用電氣方式產生超聲波,一類是用機械方式產生超聲波。本課題屬于近距離測量,可以采用常用的壓電式超聲波換能器來實現。
根據設計要求并綜合各方面因素,可以采用AT89S51單片機作為主控制器,用動態掃描法實現LED數字顯示,超聲波驅動信號用單片機的定時器完成,超聲波測距器的系統框圖如下圖所示:
超聲波測距器系統設計框圖
三、系統組成
硬件部分
主要由單片機系統及顯示電路、超聲波發射電路和超聲波檢測接收電路三部分組成。采用AT89S51來實現對CX20106A紅外接收芯片和TCT40-10系列超聲波轉換模塊的控制。單片機通過P1.0引腳經反相器來控制超聲波的發送,然后單片機不停的檢測INT0引腳,當INT0引腳的電平由高電平變為低電平時就認為超聲波已經返回。計數器所計的數據就是超聲波所經歷的時間,通過換算就可以得到傳感器與障礙物之間的距離。
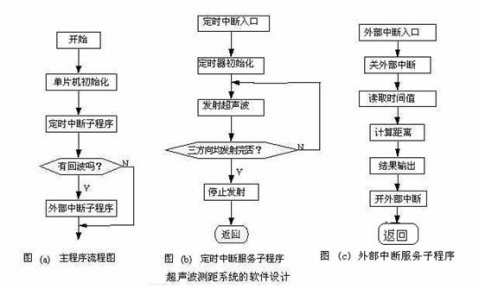
軟件部分
主要由主程序、超聲波發生子程序、超聲波接收中斷程序及顯示子程序等部分。
四、系統硬件電路設計
1.單片機系統及顯示電路
單片機采用89S51或其兼容系列。采用12MHz高精度的晶振,以獲得較穩定的時鐘頻率,減小測量誤差。單片機用P1.0端口輸出超聲波轉化器所需的40KHz方波信號,利用外中斷0口檢測超聲波接受電路輸出的返回信號。顯示電路采用簡單實用的4位共陽LED數碼管,段碼用74LS244驅動,位碼用PNP三極管驅動。單片機系統及顯示電路如下圖所示
單片機及顯示電路原理圖
2.超聲波發射電路原理圖參考期刊如圖所示:
超聲波發射電路原理圖
壓電超聲波轉換器的功能:利用壓電晶體諧振工作。內部結構上圖所示,它有兩個壓電晶片和一個共振板。當它的兩極外加脈沖信號,其頻率等于壓電晶片的固有振蕩頻率時,壓電晶片將會發生共振,并帶動共振板振動產生超聲波,這時它就是一超聲波發生器;如沒加電壓,當共振板接受到超聲波時,將壓迫壓電振蕩器作振動,將機械能轉換為電信號,這時它就成為超聲波接受轉換器。超聲波發射轉換器與接受轉換器其結構稍有不同。
3.超聲波檢測接受電路
參考紅外轉化接收期刊的電路采用集成電路CX20106A,這是一款紅外線檢波接收的專用芯片,常用于電視機紅外遙控接收器。考慮到紅外遙控常用的載波頻率38KHz與測距超聲波頻率40KHz較為接近,可以利用它作為超聲波檢測電路。實驗證明其具有很高的靈敏度和較強的抗干擾能力。適當改變C4的大小,可改變接受電路的靈敏度和抗干擾能力。
超聲波接收電路圖
五、系統程序設計
超聲波測距軟件設計主要由主程序,超聲波發射子程序,超聲波接受中斷程序及顯示子程序組成。下面對超聲波測距器的算法,主程序,超聲波發射子程序和超聲波接受中斷程序逐一介紹。
1.超聲波測距器的算法設計
下圖示意了超聲波測距的原理,即超聲波發生器T在某一時刻發出的一個超聲波信號,當超聲波遇到被測物體后反射回來,就被超聲波接收器R所接受。這樣只要計算出發生信號到接受返回信號所用的時間,就可算出超聲波發生器與反射物體的距離。
距離計算公式:d=s/2=(c*t)/2
*d為被測物與測距器的距離,s為聲波的來回路程,c為聲速,t為聲波來回所用的時間
聲速c與溫度有關,如溫度變化不大,則可認為聲速是基本不變的。如果測距精度要求很高,則應通過溫度補償的方法加以校正。聲速確定后,只要測得超聲波往返時間,即可求得距離。在系統加入溫度傳感器來監測環境溫度,可進行溫度被償。這里可以用DS18B20測量環境溫度,根據不同的環境溫度確定一聲速提高測距的穩定性。為了增強系統的可靠性,應在軟硬件上采用抗干擾措施。
不同溫度下的超聲波聲速表
溫度/
-30
-20
-10
0
10
20
30
100
聲速c(m/s)
313
319
325
323
338
344
349
386
2.主程序
主程序首先對系統環境初始化,設置定時器T0工作模式為16位的定時計數器模式,置位總中斷允許位EA并給顯示端口P0和P2清0。然后調用超聲波發生子程序送出一個超聲波脈沖,為避免超聲波從發射器直接傳送到接收器引起的直接波觸發,需延遲0.1ms(這也就是測距器會有一個最小可測距離的原因)后,才打開外中斷0接收返回的超聲波信號。由于采用12MHz的晶振,機器周期為1us,當主程序檢測到接收成功的標志位后,將計數器T0中的數(即超聲波來回所用的時間)按下式計算即可測得被測物體與測距儀之間的距離,設計時取20℃時的聲速為344m/s則有:
d=(C*T0)/2=172T0/10000cm(其中T0為計數器T0的計數值)
測出距離后結果將以十進制BCD碼方式LED,然后再發超聲波脈沖重復測量過程。主程序框圖如下
3.超聲波發生子程序和超聲波接收中斷程序
超聲波發生子程序的作用是通過P1.0端口發送2個左右的超聲波信號頻率約40KHz的方波,脈沖寬度為12us左右,同時把計數器T0打開進行計時。超聲波測距器主程序利用外中斷0檢測返回超聲波信號,一旦接收到返回超聲波信號(INT0引腳出現低電平),立即進入中斷程序。進入該中斷后就立即關閉計時器T0停止計時,并將測距成功標志字賦值1。如果當計時器溢出時還未檢測到超聲波返回信號,則定時器T0溢出中斷將外中斷0關閉,并將測距成功標志字賦值2以表示此次測距不成功。
六.軟硬件調試及性能
超聲波測距儀的制作和調試,其中超聲波發射和接收采用Φ15的超聲波換能器TCT40-10F1(T發射)和TCT40-10S1(R接收),中心頻率為40kHz,安裝時應保持兩換能器中心軸線平行并相距4~8cm,其余元件無特殊要求。若能將超聲波接收電路用金屬殼屏蔽起來,則可提高抗干擾能力。根據測量范圍要求不同,可適當調整與接收換能器并接的濾波電容C4的大小,以獲得合適的接收靈敏度和抗干擾能力。
硬件電路制作完成并調試好后,便可將程序編譯好下載到單片機試運行。根據實際情況可以修改超聲波發生子程序每次發送的脈沖寬度和兩次測量的間隔時間,以適應不同距離的測量需要。根據所設計的電路參數和程序,測距儀能測的范圍為0.07~5.5m,測距儀最大誤差不超過1cm。系統調試完后應對測量誤差和重復一致性進行多次實驗分析,不斷優化系統使其達到實際使用的測量要求。
后續工作需實驗后才能驗證
根據參考電路和集成的電路器件測距范圍有限10m以內為好。
程序清單
以下是用匯編語言編寫的超聲波測距控制源程序:
采用AT89S51 12MHz晶振
顯示緩沖單元在40H~43H,使用內存44H、45H、46H用于計算距離
20H用于標志
VOUT EQU P1.0 ;脈沖輸出端口
*中斷入口程序*
ORG 0000H
LJMP START
ORG 0003H
LJMP PINT0
ORG 000BH
LJMP INTT0
ORG 0013H
RETI
ORG 001BH
LJMP INTT1
ORG 0023H
RETI
ORG 002BH
RETI
*主程序*
START: MOV SP, #4FH
MOV R0, #40H ;40~43H為顯示數據存放單元(40為最高位)
MOV R7,#0BH
CLEARDISP:MOV @R0, #00H
INC R0
DJNZ R7, CLEARDISP
MOV 20H, #00H
MOV TMOD, #21H ;T1為8位自動重裝模式,T0為16位定時器
MOV TH0, #00H ;65ms初值
MOV TL0, #00H ;40KHz初值
MOV TH1, #0F2H
MOV TL1, #0F2H
MOV P0, #0FFH
MOV P1, #0FFH
MOV P2, #0FFH
MOV P3, #0FFH
MOV R4, #04H ;超聲波脈沖個數控制(為賦值的一半)
SETB PX0
SETB ET0
STEB EA
CLR 00H
SETB TR0 ;開啟測距定時器
START1: LCALL DISPLAY
JNB 00H, START1 ;收到反射信號時標志位為1
CLR EA
LCALL WORK ;計算距離子程序
SETB EA
CLR 00H
SETB TR0 ;重新開啟測距定時器
MOV R2, #64H ; 測量間隔控制(約4*100=400ms)
LOOP: LCALL DISPLAY
DJNZ R2, LOOP
SJMP START 1
*中斷程序*
;T0中斷,65ms中斷一次
INTT0: CLR EA
CLR TR0
MOV TH0, #00H
MOV TL0, #00H
SETB ET1
SETB EA
SETB TR0 ;啟動計時器T0,用以計算超聲波來回時間
SETB TR1 ;開啟發超聲波用定時器T1
OUT: RETI
;T1中斷,發超聲波用
INTT1: CPL VOUT
DJNZ R4,RETIOUT
CLR TR1 ;超聲波發送完畢,關T1
CLR ET1
MOV R4,#04H
SETB EX0 ;開啟接收回波中斷
RETIOUT: RETI
;外中斷0,收到回波時進入
PINT0: CLR TR0 ;關計數器
CLR TR1
CLR ET1
CLR EA
CLR EX0
MOV 44H, TL0 ;將計數值移入處理單元
MOV 45H, TH0
SETB 00H ;接收成功標志
RETI
*延時程序*
DL1MS: MOV R6, #14H
DL1: MOV R7, #19H
DL2: DJNZ R6, DL2
DJNZ R6, DL1
RET
*顯示程序*
;40H為最高位,43H為最低位,先掃描高位
DISPLAY: MOV R1, #40H;G
MOV R5,#0F7H;G
PLAY: MOV A, R5
MOV P0, #0FFH
MOV P2, A
MOV A, @R1
MOV DPTR, #TAB
MOVC A, @A+DPTR
MOV P0, A
LCALL DLIMS
INC R1
MOV A, R5
JNB ACC.0, ENDOUT;G
RR A
MOV R5, A
AJMP PLAY
ENDOUT; MOV P2, #0FFH
MOV P0, #0FFH
RET
TAB; DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H,0FFH,88H,0BFH
;共陽數碼管 0 ,1, 2,3,4,5,6,7,8,9,不亮,A, —
*距離計算程序(=計算值×17/1000cm) 近似
WORK: PUSH ACC
PUSH PSW
PUSH B
MOV PSW, #18H
MOV R3, 45H
MOV R2, 44H
MOV R1, #00D
MOV R0, #17D
LCALL MUL2BY2
MOV R3, #03H
MOV R2, #0E8H
LCALL DIV4BY2
LCALL DIV4BY2
MOV 40H, R4
MOV A, 40H
JNZ JJ0
MOV 40H, #0AH ;最高位為0,不點亮
JJ0: MOV A R0
MOV R4, A
MOV A R1
MOV R5 A
MOV R3, #00D
MOV R2, #100D
LCALL DIV4BY2
MOV 41H, R4
MOV A, 41H
JNZ JJ1
MOV A, 40H ;此高位為0,先看最高位是否為不亮
SUBB A, #0AH
JNZ JJ1
MOV 41H, #0AH ; 最高位不亮,次高位也不亮
JJ1: MOV A, R0
MOV R4, A
MOV A, R1
MOV R5, A
MOV R3, #00D
MOV R2, #10D
LCALL DIV4BY2
MOV 42H, R4
MOV A 42H
JNZ JJ2
MOV A, 41H ;次高位為0,先看次高位是否為不亮
SUBB A, #0AH
JNZ JJ2
MOV 42H, #0AH ;次高位不亮,次高位也不亮
JJ2: MOV 43H, R0
POP B
POP PSW
POP ACC
RET
*兩字節無符號數乘法程序
MUL2BY2: CLR A
MOV R7, A
MOV R6, A
MOV R5, A
MOV R4, A
MOV 46H, #10H
MULLOOP1: CLR C
MOV A, R4
RLC A
MOV R4, A
MOV A, R5
RLC A
MOV R5, A
MOV A, R6
RLC A
MOV R6, A
MOV A, R7
RLC A
MOV R7, A
MOV A, R0
RLC A
MOV R0, A
MOV A, R1
RLC A
MOV R1, A
JNC MULLOOP2
MOV A, R4
ADD A, R2
MOV R4, A
MOV A, R5
ADDC A, R3
MOV R5, A
MOV A, R6
ADDC A, #00H
MOV R6, A
MOV A, R7
ADDC A, #00H
MOV R7, A
MULLOOP2: DJNZ 46H, MULLOOP1
RET
*四字節/兩字節無符號數除法程序*
DIV4BY2: MOV 46H, #20H
MOV R0, #00H
MOV R1, #00H
DIVLOOP1: MOV A, R4
RLC A
MOV R4, A
MOV A, R5
RLC A
MOV R5, A
MOV A, R6
RLC A
MOV R6, A
MOV A, R7
RLC A
MOV R7, A
MOV A, R0
RLC A
MOV R0, A
MOV A, R1
RLC A
MOV R1, A
CLR C
MOV A, R0
SUBB A, R2
MOV B, A
MOV A, R1
SUBB A, R3
JC DIVLOOP2
MOV R0, B
MOV R1, A
DIVLOOP2: CPL C
DJNZ 46H, DIVLOOP1
MOV A, R4
RLC A
MOV R4, A
MOV A, R5
RLC A
MOV R5, A
MOV A, R6
RLC A
MOV R6, A
MOV A, R7
RLC A
MOV R7, A
RET
;
END
附C51程序
#include
#define uchar unsigned char
#define uint unsigned int
#define ulong unsigned long
extern void cs_t(void);
extern void delay(uint);
extern void display(uchar*);
//data uchar display(uchar*);
data uchar testok;
void main (void)
{
data uchar dispram[5];
data uint i;
data ulong time;
P0=0xff;
P2=0xff;
TMOD=0x11;
IE=0x80;
while (1)
{
cs_t();
delay(1);
testok=0;
EX0=1;
ET0=1;
while(! testok) display(dispram);
if (1==testok)
{
time=TH0;
time=(time<<8)| TL0;
time*=172;
time/=10000;
dispram[0]=(uchar) (time%10);
time/=10;
dispram[1]=(uchar) (time%10);
time/=10;
dispram[2]=(uchar) (time%10);
dispram[3]=(uchar) (time/10);
if (0==dispram[3]) dispram[3]=17;
} else
{
dispram [0]=16;
dispram [1]=16;
dispram [2]=16;
dispram [3]=16;
}
for (i=0;i<300;i++) display(dispram);
}
}
void cs_r(void) interrupt 0
{
TR0=0;
ET0=0;
EX0=0;
testok=1;
}
void overtime(void) interrupt 1
{
EX0=0;
TR0=0;
ET0=0;
testok=2;
}
NAME CS_T
?PR?CS_T?CS_T SEGMENT CODE
PUBLIC CS_T
RSEG ?PR?CS_T?CS_T
CS_T: PUSH ACC
MOV TH0, #00H
MOV TL0, #00H
MOV A, #4D
SETB TR0
CS_T1: CPL p1.0
NOP
NOP
NOP
NOP
NOP
NOP
NOP
NOP
NOP
NOP
DJNZ ACC,CS_T1
POP ACC
RET
;
END
name delay
?pr?_delay?delay segment code
public _delay
rseg ?pr?_delay?delay
_delay: push acc
mov a,r7
jz dela1
inc r6
dela1: mov r5,#50d
djnz r5, $
djnz r7,dela1
djnz r6,dela1
pop acc
ret
end
NAME DISPLAY
?PR?_DISPLAY?display segment code
?co?_DISPLAY?display segment data
EXTRN CODE (_DELAY)
PUBLIC _DISPLAY
RSEG ?CO?_DISPLAY?DISPLAY
?_display?byte:
dispbit: ds 1
dispnum: ds 1
rseg ?pr?_display?display
_display: push acc
push dph
push dpl
push psw
inc dispnum
mov a,dispnum
cjne a,#4d,disp1
DISP1: JC DISP2
MOV DISPNUM,#00H
MOV DISPBIT,#0FEH
DISP2: MOV A,R1
ADD A,DISPNUM
MOV R0,A
MOV A,@R0
MOV DPTR,#DISPTABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,DISPNUM
CJNE A,#2D,DISP3
CLR P0.7
DISP3: MOV P2,DISPBIT
MOV R5,#00H
MOV R7,#0AH
LCALL _DELAY
MOV P0,#0FFH
MOV P2,#0FFH
MOV A,DISPBIT
RL A
MOV DISPBIT,A
POP PSW
POP DPL
POP DPH
POP ACC
RET
DISPTABLE: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H,88H,83H,0C6H,0A1H,86H,8EH,0BFH,0FFH
END

評論