32. 電子密碼鎖設計

根據設定好的密碼,采用二個按鍵實現密碼的輸入功能,當密碼輸入正確之后,鎖就打開,如果輸入的三次的密碼不正確,就鎖定按鍵3秒鐘,同時發現報警聲,直到沒有按鍵按下3種后,才打開按鍵鎖定功能;否則在3秒鐘內仍有按鍵按下,就重新鎖定按鍵3秒時間并報警。
2.電路原理圖
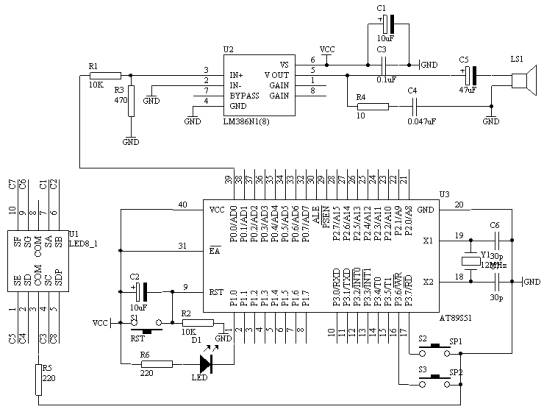
(1).把“單片機系統”區域中的P0.0/AD0用導線連接到“音頻放大模塊”區域中的SPKIN端子上;
(2).把“音頻放大模塊”區域中的SPKOUT端子接喇叭和;
(3).把“單片機系統”區域中的P2.0/A8-P2.7/A15用8芯排線連接到“四路靜態數碼顯示”區域中的任一個ABCDEFGH端子上;
(4).把“單片機系統“區域中的P1.0用導線連接到“八路發光二極管模塊”區域中的L1端子上;
(5).把“單片機系統”區域中的P3.6/WR、P3.7/RD用導線連接到“獨立式鍵盤”區域中的SP1和SP2端子上;
4.程序設計內容
(1).密碼的設定,在此程序中密碼是固定在程序存儲器ROM中,假設預設的密碼為“12345”共5位密碼。
(2).密碼的輸入問題:
由于采用兩個按鍵來完成密碼的輸入,那么其中一個按鍵為功能鍵,另一個按鍵為數字鍵。在輸入過程中,首先輸入密碼的長度,接著根據密碼的長度輸入密碼的位數,直到所有長度的密碼都已經輸入完畢;或者輸入確認功能鍵之后,才能完成密碼的輸入過程。進入密碼的判斷比較處理狀態并給出相應的處理過程。
(3).按鍵禁止功能:初始化時,是允許按鍵輸入密碼,當有按鍵按下并開始進入按鍵識別狀態時,按鍵禁止功能被激活,但啟動的狀態在3次密碼輸入不正確的情況下發生的。
5.C語言源程序
#include
unsignedcharcodeps[]={1,2,3,4,5};
unsignedcharcodedispcode[]={0x3f,0x06,0x5b,0x4f,0x66,
0x6d,0x7d,0x07,0x7f,0x6f,0x00,0x40};
unsignedcharpslen=9;
unsignedchartemplen;
unsignedchardigit;
unsignedcharfuncount;
unsignedchardigitcount;
unsignedcharpsbuf[9];
bitcmpflag;
bithibitflag;
biterrorflag;
bitrightflag;
unsignedintsecond3;
unsignedintaa;
unsignedintbb;
bitalarmflag;
bitexchangeflag;
unsignedintcc;
unsignedintdd;
bitokflag;
unsignedcharoka;
unsignedcharokb;
voidmain(void)
{
unsignedchari,j;
P2=dispcode[digitcount];
TMOD=0x01;
TH0=(65536-500)/256;
TL0=(65536-500)%256;
TR0=1;
ET0=1;
EA=1;
while(1)
{
if(cmpflag==0)
{
if(P3_6==0)//functionkey
{
for(i=10;i>0;i--)
for(j=248;j>0;j--);
if(P3_6==0)
{
if(hibitflag==0)
{
funcount++;
if(funcount==pslen+2)
{
funcount=0;
cmpflag=1;
}
P1=dispcode[funcount];
}
else
{
second3=0;
}
while(P3_6==0);
}
}
if(P3_7==0)//digitkey
{
for(i=10;i>0;i--)
for(j=248;j>0;j--);
if(P3_7==0)
{
if(hibitflag==0)
{
digitcount++;
if(digitcount==10)
{
digitcount=0;
}
P2=dispcode[digitcount];
if(funcount==1)
{
pslen=digitcount;
templen=pslen;
}
elseif(funcount>1)
{
psbuf[funcount-2]=digitcount;
}
}
else
{
second3=0;
}
while(P3_7==0);
}
}
}
else
{
cmpflag=0;
for(i=0;i
if(ps
{
hibitflag=1;
i=pslen;
errorflag=1;
rightflag=0;
cmpflag=0;
second3=0;
gotoa;
}
}
cc=0;
errorflag=0;
rightflag=1;
hibitflag=0;
a:cmpflag=0;
}
}
}
voidt0(void)interrupt1using0
{
TH0=(65536-500)/256;
TL0=(65536-500)%256;
if((errorflag==1)&&(rightflag==0))
{
bb++;
if(bb==800)
{
bb=0;
alarmflag=~alarmflag;
}
if(alarmflag==1)
{
P0_0=~P0_0;
}
aa++;
if(aa==800)
{
aa=0;
P0_1=~P0_1;
}
second3++;
if(second3==6400)
{
second3=0;
hibitflag=0;
errorflag=0;
rightflag=0;
cmpflag=0;
P0_1=1;
alarmflag=0;
bb=0;
aa=0;
}
}
if((errorflag==0)&&(rightflag==1))
{
P0_1=0;
cc++;
if(cc<1000)
{
okflag=1;
}
elseif(cc<2000)
{
okflag=0;
}
else
{
errorflag=0;
rightflag=0;
hibitflag=0;
cmpflag=0;
P0_1=1;
cc=0;
oka=0;
okb=0;
okflag=0;
P0_0=1;
}
if(okflag==1)
{
oka++;
if(oka==2)
{
oka=0;
P0_0=~P0_0;
}
}
else
{
okb++;
if(okb==3)
{
okb=0;
P0_0=~P0_0;
}
}
}
}

評論