第一部分 常用的幾個程序模塊

1.1 簡單延時子程序
本文引用地址:http://www.104case.com/article/201611/315469.htm在做單片機控制時,經常要遇到到延時的問題。比如要讓蜂鳴器響1s,然后停1s,然后再響1s,反復下去。這個例子,要求延時的時間已經很準確了(1s),一般情況下,如果要求延時的時間不需要很精確,那么可以寫一個簡單的延時程序,然后通過調試,最后達到延時的目的。
這種方法適合大概的延時,可以通過while或for循環實現。為方便后續研究,我用for循環方式。
程序可以這樣寫:
#include
#define uint unsigned int
#define uchar unsigned char //宏定義
void delay()//延時函數
{
uint x,y;
for(x=100;x>0;x--)
for(y=5000;y>0;y--);
}
void main()
{
delay();
}
通過調試循環次數x,y值,改變延時間,最后達到滿意的數值為止。
1.2帶參數的延時子程序
#define uint unsigned int
#define uchar unsigned char
void delay(uint z)//延時函數
{
uint x,y;
for(x=100;x>0;x--)
for(y=z;y>0;y--);
}
void main()
{
delay(k)//k為常數
}
在主函數main中調整常數k,方可達到延時目的。
1.3中斷程序
中斷:CPU在處理某一事件A時,發生了另一事件B請求CPU迅速去處理(中斷發生);CPU暫時中斷當前的工作,轉去處理事件B(中斷響應和中斷服務);待CPU將事件B處理完畢后,再回到原來事件A被中斷的地方繼續處理事件A(中斷返回),這一過程稱為中斷。
理解上述中斷的定義,有兩點需要注意:1,中斷程序執行完,又返回中斷前的地方(斷點)接著執行程序;2,中斷的函數不需要聲明,且該函數放在main函數的外面(附中斷程序)。
附:80C51的中斷系統
80C51的中斷系統有5個中斷源(見圖1)(8052有6個),2個優先級,可實現二級中斷嵌套。

圖1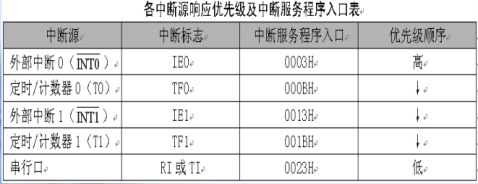
圖2
說明:圖1,外部中斷上的橫線表示低電平有效。
1中斷請求標志寄存器TCON:

說明:
IT0(TCON.0),外部中斷0觸發方式控制位。
當IT0=0時,為電平觸發方式。
當IT0=1時,為邊沿觸發方式(下降沿有效)。
IE0(TCON.1),外部中斷0中斷請求標志位。
IT1(TCON.2),外部中斷1觸發方式控制位。
IE1(TCON.3),外部中斷1中斷請求標志位。
TF0(TCON.5),定時/計數器T0溢出中斷請求標志位。(硬件控制)
TF1(TCON.7),定時/計數器T1溢出中斷請求標志位。(硬件控制)
注意:低四位用于控制外部中斷,高四位用于控制和申請定時/計數器中斷;TF0、TF1由硬件自動控制;TR0(TR1)為1時,定時器0(1)啟動,反之停止(軟件控制)。可直接進行位操作。
2中斷標志寄存器IE:為1,中斷允許。(可進行位操作)
3中斷優先級寄存器IP:

說明:
80C51單片機有兩個中斷優先級,即可實現二級中斷服務嵌套。每個中斷源的中斷優先級都是由中斷優先級寄存器IP中的相應位的狀態來規定的。
§PX0(IP.0),外部中斷0優先級設定位;
§PT0(IP.1),定時/計數器T0優先級設定位;
§PX1(IP.2),外部中斷0優先級設定位;
§PT1(IP.3),定時/計數器T1優先級設定位;
§PS(IP.4),串行口優先級設定位;
§PT2(IP.5),定時/計數器T2優先級設定位。
§CPU同時接收到幾個中斷時,首先響應優先級別最高的中斷請求。
§正在進行的中斷過程不能被新的同級或低優先級的中斷請求所中斷。
§正在進行的低優先級中斷服務,能被高優先級中斷請求所中斷。
總結:
中斷響應條件
§中斷源有中斷請求;(TCON)
§此中斷源的中斷允許位為1;(IE)
§CPU開中斷(即EA=1)。(EA)
以上三條同時滿足時,CPU才有可能響應中斷。
中斷子程序(定時器0(1)中斷響應):
void main()
{
EA=1;//開CPU中斷
ET0=1;//開定時器0(中斷允許)
ET1=1;
TR0=1;//啟動定時器0
TR1=1;
}
void time0() interrupt 1 //中斷函數time0()不需要聲明,數字1與優先級有關,如外部中斷0,應設置為0(interrupt 0)。
{}
void time1() interrupt 3
{}
1.4定時器和計數器
前面已經介紹了延時,但是那種方法延時的時間做不到很精確,今天介紹一種精確的方法,就是定時器/計數器。
1.41 與定時器/計數器有關的寄存器
lTCON:前面已經介紹過,它主要是控制啟動和申請中斷。
lTMOD:控制定時器的控制方式。可用下圖描述:

說明:
l高四位與T1操作有關,低四位與T0操作有關;
lM1MO為工作方式設置位。一般工作在方式1下,此時M1MO=01;
l在GATE=0時,需用軟件使TCON中的位TRO(TR1)置1,啟動定時器。C/T0=0為定時模式,C/T0=1為計數模式;
1.42定時器/計數器工作原理
定時/計數器的實質是加1計數器(16位),由高8位THO(1)和低8位TL(1)兩個寄存器組成。加1計數器輸入的計數脈沖有兩個來源,一個是由系統的時鐘振蕩器輸出脈沖經12分頻后送來;一個是T0或T1引腳輸入的外部脈沖源。每來一個脈沖計數器加1,當加到計數器為全1時,再輸入一個脈沖就使計數器回零,且計數器的溢出使TCON中TF0或TF1置1,向CPU發出中斷請求(定時/計數器中斷允許時)。如果定時/計數器工作于定時模式,則表示定時時間已到;如果工作于計數模式,則表示計數值已滿。
可見,由溢出時計數器的值(注:16位全填滿1時,數值剛好是65535。而溢出時計數器的值應該是65535+1=65536,即216)減去計數初值才是加1計數器的計數值。
從上面可以得到兩個結論:
l計數位數是16位:高8位THO(1)和低8位TL(1);
l計數參數(添入TH和TL)與計數初值的關系:X=216-N;//假設定時時間是50ms,即N=50000;則計數參數=65536-50000=15536。
附:計算THO(1)和低8位TL(1)初值// 假設延時時間為50ms
TH=(65536-50000)/256//求模
TL=(65536-50000)%256//求余
定時/計數器初始化程序應完成如下工作:
l對TMOD賦值,以確定T0(1)的工作方式;
l計算初值,并將其寫入TH、TL;
l中斷方式時,則對IE賦值,開放中斷;
l使TR0或TR1置位啟動定時/計數器定時或計數。
定時程序模塊:
#include
void main()
{
TMOD=0x01;//定時器T0工作方式1
//送初值,定時為50ms。
TH0=(65536-50000)/256;
TL0=65536-50000)%256;
EA=1;//開總中斷
ET0=1;//開定時器0中斷
TRO=0;//啟動定時器0
}

評論