數字式MEMS加速度傳感器在車載導航中的應用

隨著定位導航技術的飛速發展,車載導航系統在相關領域得到了越來越廣泛的應用。車載導航系統的功能是幫助用戶確定車輛位置并提供正確的操作指示,因此定位的精確程度成為衡量一套系統性能優劣的重要指標。目前,隨著城市道路的發展,高架路日益成為城市交通的樞紐,因此如何對車輛是否位于高架上的定位成為了車載導航系統急需解決的問題。常用的GPS 衛星定位雖然可以測量高度,但是誤差卻在100m左右,無法達到高架一般幾米的要求,所以直接測量的方法是很難滿足的。
本文引用地址:http://www.104case.com/article/201610/311129.htm這里使用國外成熟的加速度計器件ADXL 202JE,通過測量車輛上下高架時的傾斜角變化,結合GPS定位來判斷車輛是否位于高架上。
系統設計
測量原理
ADXL 202JE采用先進的MEMS技術,在同一硅片中刻蝕了一個多晶硅表面微機械傳感器,并集成了一套精密的信號處理電路,如圖1 所示。
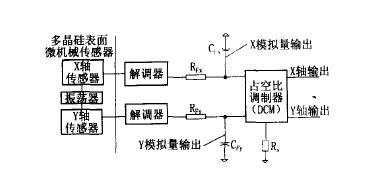
圖1 ADXL 202 功能結構框圖
傳感器主要是由一個利用表面微機械加工的多晶硅機構和一個差動電容器組成。在加速度的作用下,多晶硅結構會產生偏移使電容值發生變化。在信號處理電路中(如圖1) ,差動電容器的變化信號由解調器解調后通過一個RC 濾波器(由內部RFy,RFy和外部CFy,CFy構成) 送到占空比調制器中,由調制器轉換為占空比與加速度成正比的方波,方波的周期(T2) 可以通過RS 確定。這個方波可以直接送到單片機進行處理,通過使用計數器測量方波周期T2 以及脈沖的寬度T1 (如圖2) ,從而得到加速度的值。
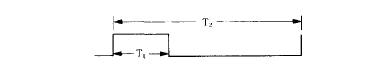
圖2 ADXL 202JE 輸出波形示意圖
加速度: a= (T1/T2- u0g)/u1g式中:T2 由占外接電阻器RS 確定,其關系為T2= RS/125兆歐; u0g為0g 對應的占空比,其典型值是50%; u1g表示1g 加速度變化引起的占空比變化值,對于ADXL 202JE,1g的典型值是12.5%。
硬件設計
如圖3,系統主要包括三個部分。

圖3 測量電路原理框圖
(1) 測量部分電路主要由ADXL 202JE構成,并輔助以一些濾波及調節電路;
(2) 系統控制電路部分主要由AT89C52單片機以及MAX232構成,由單片機處理占空比調制信號,MAX232芯片實現串口通信;
(3)GPS模塊選用摩托羅拉的GT型Oncore接收器。
軟件設計
單片機采用中斷觸發的方式來測量傳感器輸出脈沖周期,從而計算當前系統的傾斜角,并結合GPS模塊判斷車輛是否上高架,主要流程框圖如圖4 所示。
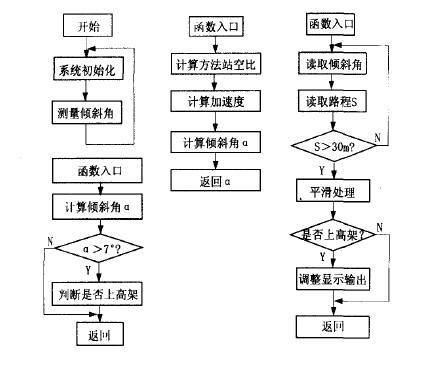
圖4 程序流程圖
結論與討論
測量動態加速度的帶寬選擇
ADXL 202JE帶寬式中:
占空比調制器周期的確定
對于ADXL 202JE,當DCM輸出方波頻率大于模擬帶寬10倍以上,測量準確度就很理想,因此周期越小越好。但是周期的減小對微控制器的處理速度要求會提高,而實際中硬件的處理速度是受到器件性能限制的。綜合以上因素,方波的周期是根據模擬帶寬、處理器速度以及測量分辨力的要求共同確定的。
實驗分析
根據實際的精度要求,實驗選用1uF 的濾波電容,這樣帶寬為5Hz,噪聲約為0.43mg。Rs阻值為1M,這樣輸出方波周期約為141Hz。采用12M晶振的單片機,這樣占空比的精度可到達0.14%。在實際車載實驗中,經過濾波和平滑處理,并通過反復調試基本實現了設計目的(圖5 是實際測得的數據)。
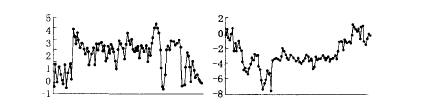
圖5 車輛上下高架時傾斜角測量曲線
結論
應用上述的設計方法及其要點,基本實現了對車輛定位的要求,達到了預期效果。實踐證明ADXL 202JE非常適合于頻率變化較為緩慢、加速度不太大的測量。在充分考慮各種因素基礎上,合理設計有關參數,就可以得到很好的準確度。









評論