數字微流控生物芯片的電極管腳控制信號處理

微流控芯片實驗室又稱為微流控(Microfluidics)芯片、芯片實驗室(Lab-on-a-Chip,LoC)或生物微機電系統(bio-MEMS),基于連續流體的微流控生物芯片又稱為數字微流控生物芯片(Digital MicrofluidicBiochip,DMFB)。由于DMFB中控制電極的獨立控制引腳數量是重要的成本動因,電極以電驅動的形式連接到控制引腳,許多典型的生物芯片用直接尋址的方式來實現電極的控制,每個電極連接一個專用的控制引腳,因此,其能獨立被激活,這種方法可使液滴自由的操縱,但對于一個實際的DMFB其需要過多的控制引腳,顯著地增加了產品的制造成本。對于大規模的DMFB,在確保測試完成時間的情況下,盡量減少控制引腳的數量,對于未來的發展具有重要的意義。
本文引用地址:http://www.104case.com/article/201610/309165.htm1 電極管腳控制信號處理
1.1 DMFB基本原理
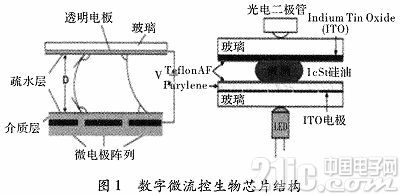
數字微流控生物芯片利用介電潤濕的原理在二維的電極陣列中操縱和移動納升級的離散液滴。如圖1所示,數字微流控生物芯片的基本單元包括兩個平板和夾在平板中間的填充,液滴在填充介質內運行。底板包含一個單獨控制的有圖案的電極陣列,頂板覆蓋了一層連續的地線。通過改變沿著電極的一個線性陣列的電勢,液滴可以沿著電極的一條線移動。可通過調整控制電壓(0~90 V)來控制液滴的速度,且液滴能最高以20 cm/s的速度移動,基于這一原理,液滴能自由移動到2維陣列的任何位置,而無需微型泵和微型閥。
1.2 DMFB相關研究
為減少控制引腳的數量,2006年Xu Tao提出了用陣列分區和詳細的引腳分配的方法來減少控制引腳的數量,然而這種方法在每個分區中至少需要5個控制引腳,對于包含多重液滴混合的分區,會用到直接尋址的方法,這種方法的陣列設計僅限于目標生物流體應用,且僅限于控制引腳數的減少而不能確保完成時間。Srinivasan又提出了對于焊接的電潤濕生物芯片用一個流體路徑的多相位總線來使得控制引腳數最小,對一個傳輸總線只需n個控制引腳,而不需考慮其所包含電極的數量。盡管多相總線的方法可用來減少控制引腳的數量,但其只適用于一維陣列。另一個替代的方法是S.K.Fan等人提出的行和列的尋址,被稱為“交叉引用”驅動方案,但由于電極的干擾,處理多于兩個液滴的同時移動的設計非常的復雜,對于高通量的應用,最終產生的液滴移動的序列化是一個嚴重缺陷。并交叉引用設計需要一個特定的電極結構,會導致制造成本的增加。
根據上述方法所存在的不足,文中提出了一種優化方法,在根據液滴路由路徑產生電極驅動序列后,根據一個控制引腳最對所能驅動的電極數,對驅動序列進行分區后比對,找出相互兼容的驅動序列,其可共用一個控制引腳。
2 控制信號優化處理方法
通常在一個特定的時間步,移動一個液滴的控制信號可用激活位“1”,釋放位“0”或不影響位“x”來表示,“1”/“0”表示一個控制信號有一個相關的邏輯高/邏輯低的驅動電壓值。“x”表明輸入信號可用“1”或“0”表示,并對流體控制的調度無影響。最終串聯輸出稱為電極驅動序列。
如圖2所示,液滴按照圖示的方向以類似掃描的方法從源極出發最終到達槽電極。
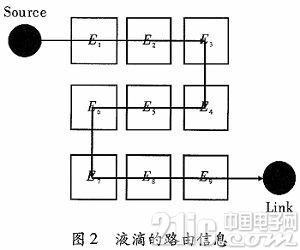
本文用“1”,“0”,“x”3個值表示一個生物鑒定的電極驅動序列,按照液滴的路由路徑產生的電極驅動序列如表1所示。
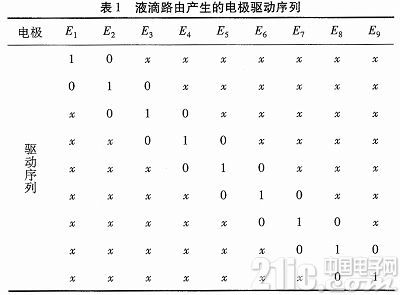
如表1所示,每個驅動序列均包含一些可用“1”或“0”來替代的“無影響”單元“x”,通過分配這些“無影響”單元,就可產生驅動序列相同的電極,即相互兼容的電極。例如:通過用“0”或“1”來替代“x”就可以使電極E1、E3、E5、E7、E9產生相同的電極驅動序列“101010101”,其可從同一個信號源產生,因此其可共用一個控制引腳,用這樣的方法便可在一定程度上減少控制引腳的數量。
對于大規模的電極陣列產生的電極驅動序列也較多。在本設計中,由于液滴路由路徑已知情況下,將會對液滴路由過程中產生的驅動序列進行分區,分區的規則是:先假設每個控制引腳最多能驅動x個電極,且以x的倍數進行分區(如x=5,則能以10來劃分,使每個分區中有10個電極驅動序列),分區后通過對每個分區中的電極驅動序列進行比對來減少控制引腳的數量。具體步驟如下:
步驟1 據液滴的路由路徑來獲得每個控制引腳的電極驅動序列。
步驟2 假設電極的每個控制引腳最多所能驅動的電極的數量x,以x的倍數對產生的電極驅動序列進行分區。
步驟3 對每個分區的電極驅動序列進行比對,找到相互兼容的驅動序列,其可由同一個控制引腳來控制。
步驟4 每個分區比對完成后,查看產生的共用引腳數量是否小于x,若小于x則與其他分區中小于x的相比較,直到最終的共用引腳數量等于x或者是沒有與其互相兼容的為止。例如:當x=3時,將由圖4產生的電極驅動序列以6來進行分區,然后對于每個分區進行比對,會得到在前6個電極中E1=E3=E5,E2=E4=E6由于共用電極數等于3,則無需再與其他電極相比較。
表2是對圖4的液滴路由產生的電極驅動序列進行x值的設定,然后分區產生的結果。
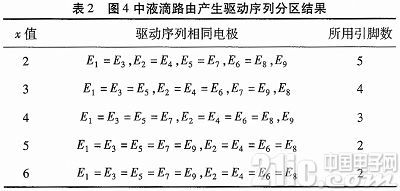
由表2中的數值可體現出,不同x值最終所減少的控制引腳數是不同的,根據x值的設定可更好的對產生的電極驅動序列進行分區,x值不僅對本身的生物芯片的性能有影響,也對最終控制引腳數的減少有一定的影響。文中的實驗結果是對x取不同值最終產生的引腳分配進行比對,用最終產生的最優引腳數與其余方法相比對。由于本方法的應用是基于液滴路由路徑已知的情況,故最終的陣列完成時問與直接尋址生物芯片的完成時間相同,確保了測試的完成時間。
3 實驗結果
本文將所提出的優化方法引用到生物芯片的多功能生物鑒定當中,來驗證方法的有效性。圖3所示,多功能的生物鑒定映射到了一個15×15的數字微流控生物芯片上。對于每個樣本和試劑均有兩個液滴分發到陣列中,因此根據多功能生物鑒定的序列圖所示:有4對液滴{S1,R1},{S1,R2},{S2,R1}和{S2,R2}執行到一起進行混合操作,最終進行4組檢測操作。
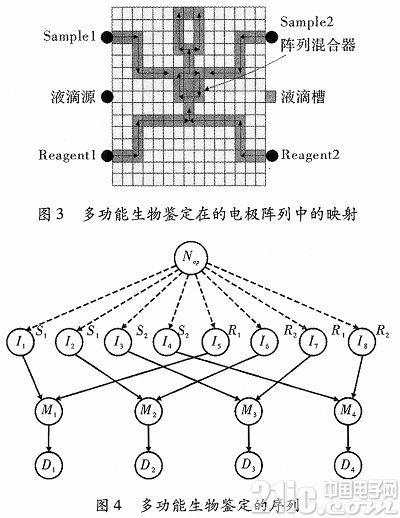
根據上述8個液滴的路由過程,產生電極驅動序列后,圖5所示為x分別取x=9,x=10,x=11,x=12再對序列進行分區,最終不同x值產生的引腳分配也不同。

如圖5(a)所示,當x=12時最終引腳減少到了19個,相當于68%的減少率。圖6是各種方案的比對結果,由圖可看出在文獻中提出的陣列分區方法最終用到了35個控制引腳,73 s的完成時間;在文獻中提出的交叉引用方法,最終減少到了30個控制引腳,132s的完成時間。由上述結果可知,最終減少的控制引腳比其他方法多,在保證測試時間的情況下,達到了更好的結果,且實現了對引腳控制信號的優化處理。
4 結束語
本文主要研究了數字微流控生物芯片的電極管腳控制信號處理,考慮生物芯片有其一定的物理性質,每個控制引腳均會有一定的驅動能力,在此假設每個控制引腳最多能驅動x個電極,然后以x的倍數對產生的電極驅動序列進行分區,再尋找相互兼容的驅動序列,不同的x值最后產生的引腳分配也不同,在文中將x=12時的實驗結果與交叉引用等方法相比較,實驗結果表明,在確保測試完成時間的情況下,最終所用到的控制引腳比其他方法少,實現了對數字微流控生物芯片的電極管腳的控制信號處理,減少了芯片的制造成本,為未來數字微流控生物芯片的研究提供了參考。

評論