基于零頻抑制與雜波圖的地面慢速目標檢測

摘要:強地物雜波嚴重影響雷達系統對慢速目標的探測性能,對此設計了基于零頻抑制與雜波圖的地面慢速目標檢測方法。采用Kalmus濾波器提高零頻抑制能力,并針對慢速目標檢測的實際需求,對其濾波性能和設計方法進行了分析。采用空間鄰域插值方式完成目標區域的雜波背景積累,解決慢速目標檢測不連續問題。最后對改進的慢速目標檢測方法進行了仿真分析。實驗結果表明,該方法對地面慢速目標的檢測概率優于其他方法。
本文引用地址:http://www.104case.com/article/201610/309027.htm邊境安全監視、重要設施防護和交通流量控制等市場需求,極大地開拓了地面雷達應用領域,使其受到越來越廣泛的重視。實際環境中,慢速目標(例如人員)是威脅度較高的一類目標,對其檢測能力成為衡量雷達系統性能的重要指標。而現實中受地雜波的影響,多數雷達對沿其徑向速度較慢的目標,面臨檢測能力不足的問題。主要原因包括:首先,相對于快速運動目標,慢速目標在多普勒域與地物雜波譜存在更為嚴重的交疊,很難從地物雜波中對其進行有效提取。其次,以行人為典型的地面慢速目標,多為弱小目標,具有機動性強、反射系數小但RCS起伏大的特點,明顯影響了對其的有效檢測。
運動平臺下的慢速目標檢測,常采用偏置相位中心天線(DPCA)和空時自適應處理(STAP)技術,但均難以直接用于地面雷達。目前,常用方法主要是由MTI濾波器抑制地物靜止雜波,然后采用靈敏度高的恒虛警檢測方法,如ML-CFAR、OS-CFAR、OSGO-CFAR等。但受系統指標限制,MTI濾波器階數不能設計過高,其較寬的過渡帶導致對寬譜地物雜波抑制中不可避免損失了目標能量。但以上算法在提高慢速目標檢測概率的同時,虛警率增加較快,對系統的性能提升有限。部分文獻提出了雜波圖檢測慢速目標的思想,并引起較大關注,但有關其具體應用情況卻報道較少。本文將雜波零頻抑制和改進的雜波圖,用于地面慢速目標檢測,以提高雷達對地面目標的探測能力。
1 基本原理
1.1 零多普勒頻率抑制
通常而言,地物雜波為靜止回波,能量集中在零多普勒頻率附近,具有雙邊對稱特點。較為惡劣的情況下,雜波均方根譜寬約0.37m/s (折合為速度值表示),而強度通常高于系統熱噪聲60 dB以上。以人員這類慢速弱小目標為典型地面慢速目標分析,其速度范圍在0.3~1.5 m/s。為實現地面慢速目標的有效檢測,首先要考慮地雜波的抑制,即零多普勒頻率附近的窄帶譜能量抑制問題。這種零頻抑制的濾波器應在零多普勒頻率處呈現深的止帶凹口,而隨著頻率的增加呈現快速的上升斜率,以保證慢速目標的檢測能力。
對于FIR數字濾波器,通常需要數十甚至上百階才能滿足要求。而Kalmus濾波器則具備這一特點。它由兩個共軛關系的復數濾波器實現,其濾波器傳輸函數可以表示為式(1)。因此,地雜波零頻抑制可通過設計Kalmus濾波器完成。
Hkamus(f)|=||H(f)|-|H*(f)| (1)
1.2 雜波圖檢測
雜波圖檢測的基本思想是利用雜波和目標回波的時間積累特性不同,完成二者的有效分離。相比基于空間平滑估計雜波背景的CFAR算法,雜波圖更好地利用了雜波的時間分布特性。而雜波圖的一階遞歸濾波方式如圖1所示。
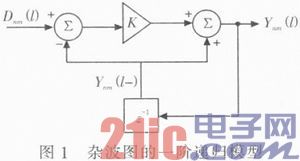
其中,l表示天線掃描周期,一次掃描得到的雜波單元幅度是Dnm(l),已知雜波圖值為Ynm(l-1),通過下式可以得到新的雜波圖值Ynm(l)。
Ynm(l)=(1-K))Ynm(l-1)+KDnm(l) (2)
K是小于1的衰減因子,多次更新之后就可以得到雜波的平均幅度。當K值取較小值,雜波圖需長時間積累平穩,適用于隨時間變化緩慢的雜波背景。較大K值則用于適應環境雜波急劇變化情況。
2 慢速目標檢測
雷達波束照射區內的地面不僅有大量的散射單元,還存在強的點狀散射單元,如城市樓房、水塔等。地雜波概率密度函數將趨向于萊斯分布,可表示為:
式中,Io為零階貝塞爾函數,σ2為代表地雜波起伏分量的平均功率,μ為強散射點的回波幅度,為低頻直流分量。當μ=0時,則恢復為瑞利分布。
通過零頻抑制去除地雜波低頻直流分量,可使Rice雜波轉換為瑞利雜波。然后對慢速目標與雜波剩余的多普勒交疊區,進行雜波圖CFAR可以改善檢測性能。基于零頻抑制和雜波圖的慢速目標檢測主要由兩部分組成,如圖2所示:1)地雜波零頻抑制;2)雜波剩余的時間平滑,即雜波圖CFAR。

3 Kalmus濾波器設計
Kalmus濾波器傳輸函數由式(1)表示,其中|H(f)|項可以通過與離散傅里葉變換等效的橫向濾波器實現。由DFT定義可以推導出其等效為一組濾波器組,其響應函數為
其中,0≤k≤N-1表示濾波器組的組號。Kalmus濾波器本質是將DFT濾波器組中的相鄰兩個濾波器相減以獲得深的凹口,然后通過頻域搬移使凹口落在零頻。由此可得到Kalmus濾波器的幅頻響應,如圖3所示。
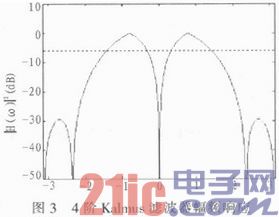
按照上述方式,兩個濾波器的系數可以設計為

其中,N代表濾波器階數,且0≤n≤N,w(n)為長度為N的窗函數。此外,Kalmus濾波器存在一定旁k,可通過窗函數法進行加權抑制。
4 改進的雜波圖檢測
普通雜波圖對慢速目標檢測,通常面臨不連續的問題。這是由于雜波圖更新頻率過快,與目標通過距離單元的時間不匹配造成的。假定雷達系統的距離單元大小為L,慢速目標以速度v通過距離單元的時間為t=L/v。假定雜波圖更新頻率遠小于t,則在t時間內目標一直位于該距離單元內。雜波圖積累將多次采用目標能量,造成雜波背景估計偏差。最終對目標的檢測結果,表現為數次檢測后目標消失;而目標運動至下一單元后,又將重復這一過程。
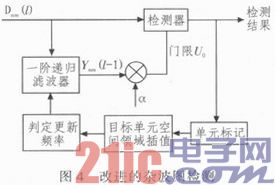
雜波圖檢測的改進包括以下方面:1)雜波圖更新頻率可設,使其與距離單元通過時間匹配。2)檢測后標記目標和背景單元,目標單元不參與雜波積累。3)采用鄰域的背景單元插值計算目標單元背景,即空間鄰域插值。改進的方法框圖如圖4所示。
5 仿真實驗
5.1 Kalmus濾波器性能仿真
為設計性能適用的零頻抑制濾波器,對不同階數下Kalmus濾波器的半功率點位置進行了仿真實驗。
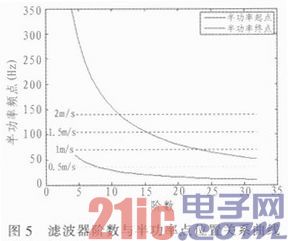
圖5為半功率點起點和終點位置隨階數的變化曲線,所加窗為Hanning窗。濾波器半功率點起點位置隨著階數增加減小,但高階濾波器起點位置減小不再明顯。本文采用8或16階。另外,加窗抑制旁k也在一定程度上增加了通帶范圍。
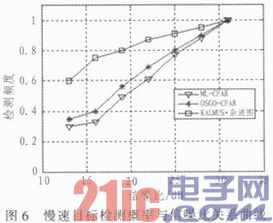
5.2 慢速目標檢測仿真
通過模擬強雜波環境下的慢速目標檢測過程,驗證檢測性能。其中,模擬雜波高于系統噪聲60 dB,目標運動速度0.5m/s,信噪比變化13-30 dB。圖6為不同方法下統計慢速目標檢測概率隨信噪比的變化曲線。可以看到,基于零頻抑制與雜波圖的地面慢速目標檢測,性能明顯優于其他方法。
6 結束語
慢速目標檢測是地面雷達系統中的技術難點。雜波抑制和目標檢測方法相結合的設計方式,提供了較好技術途徑。基于零頻抑制與雜波圖的地面慢速目標檢測方法,在雜波抑制和目標檢測兩方面進行了改進,其檢測概率改善明顯。該方法對提高地面雷達性能具有參考意義。

評論