基于太陽能路燈的全方位跟蹤太陽光系統的設計

摘要:基于太陽能路燈的全方位跟蹤太陽光系統是利用自動控制和搖桿機構與皮帶傳動的機械設計原理,實現了太陽能路燈全方位跟蹤太陽光的功能,保證太陽光始終垂直照射在電池板上,提高對太陽光的利用率。
本文引用地址:http://www.104case.com/article/201610/307163.htm1 研制背景
為了體現節能環保的理念,全國各地更注重對太陽能的利用,紛紛掀起了太陽能路燈的熱潮,而傳統的太陽能路燈無法實現對太陽光的全方位跟蹤,對太陽光的利用效率低,基于這一現象設計出了太陽能路燈全方位跟蹤太陽光系統。本文利用STC51單片以及光敏電阻模塊實現自動控制,以及搖桿機構與皮帶傳動的輔助功能實現對太陽光的全方位跟蹤。
1.1 太陽能路燈的發展現狀及問題
目前我國的照明用電占全國的12%,2015年達到5 000億千瓦時,相當于三峽水電站一年的發電量,太陽能路燈緩解了照明路燈的用電量,其能源來自于太陽,取之不盡,用之不竭。但傳統的太陽能路燈利用太陽光的效率較低,造成太陽能的利用損失。因此實現太陽能路燈的全方位跟蹤,提高太陽能的利用率。
2 全方位跟蹤太陽光系統的設計總體方案
太陽能路燈全方位跟蹤太陽光系統實現應用在路燈上的電池板對太陽光的全方位跟蹤,即上下、左右跟蹤太陽光。解決其技術問題所采用的技術方案是:利用光敏電阻控制兩個電機,通過曲柄搖桿機構和皮帶傳動機構分別實現電池板對太陽光的上下、左右的跟蹤。下面對太陽能路燈的全方位跟蹤太陽光系統進行詳細的介紹。
2.1 實現對太陽光的左右跟蹤
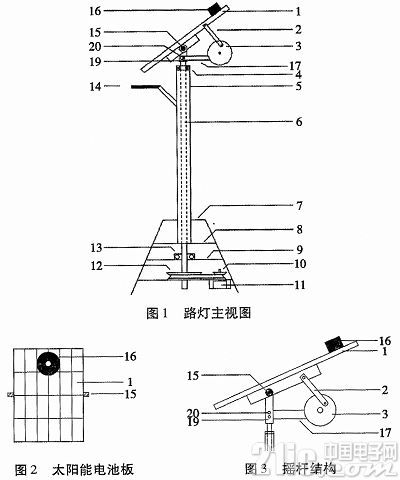
圖1為太陽能路燈的全方位跟蹤太陽光系統總體結構圖,圖2為太陽能電池板。電池板(1)與連接軸(15)連接處(21),連接軸(15)在電池板(1)下面穿過,路燈內桿(6)通過連接桿(19)和連接軸(15)與太陽能電池板(1)相連;由附圖l可知路燈內桿(6)通過滑動軸承(4)與路燈外桿(5)相隔,以及通過底座第三支撐面(9)上的推力軸承(13)來支撐路燈內桿(6)以及太陽能電池板(1)的重力,保證了路燈內桿(6)能夠轉動;大皮帶輪(12)和小皮帶輪(10)以及皮帶構成了皮帶傳動裝置,通過步進電機(11)實現皮帶傳動最終實現路燈內桿(6)的轉動,使太陽能電池板(1)實現對太陽光的左右跟蹤。此外,底座第一支撐面(7)和底座第二支撐面(8)用來支撐路燈外桿(5)。
2.2 實現太陽光的上下跟蹤
如圖1螺栓(20)將支撐桿(17)、連接桿(19)和路燈內桿(6)相結合,固定了電池板(1)以及支撐桿(17);支撐桿(17)上面固定一個步進電機(22)與其相連的是圓盤(3),步進電機(22)的轉動帶動圓盤(3)的轉動,使搖桿(2)發生傳動,最終使太陽能電池板(1)繞著連接軸(15)轉動,實現了太陽能電池板(1)對太陽光的上下跟蹤。
3 總結
隨著太陽能技術的發展,產業鏈上游利潤率壓縮,使光 伏組件的成本下降,全方位跟蹤太陽光系統的設計使太陽光始終垂直照射在電池板上,提高了電池板對太陽光的利用率,使太陽能照明系統更加完美。全方位跟蹤太陽光系統的照明路燈前景必然廣闊,但現階段我們還需要腳踏實地,穩步推進。






評論