一種工業機車通信DPSK解調器設計

摘要:車地通信系統在工業機車自動化中發揮重要作用,是列車安全可靠運行的關鍵。文中分析了感應無線通信原理,設計了一種基于感應無線技術與TMS320F28335 DSP芯片的DPSK車地通信用解調器,詳細闡述了系統的硬件組成和電路設計技術問題,給出系統軟件流程圖。該系統經過測試,具有良好的穩定性和可靠性,滿足工業機車車地通信要求。
本文引用地址:http://www.104case.com/article/201610/306576.htm0 引言
在工業生產中,要實現大型移動機車位置實時檢測與自動化控制,車地通信裝置性能具有非常重要的意義。感應無線技術是一項針對工業生產中大型移動機車自動化而研制的工業應用技術,主要包括基于感應無線的機車位置檢測技術和車地數據通信技術。感應無線數據通信是通過安裝在機車底部的天線箱與敷設在地面軌道旁的編碼電纜間的電磁耦合實現信息傳遞,由于通信距離較短,通信的質量較高。感應無線技術在工業機車自動化和軌道交通領域有廣泛的應用前景。文中提出了一種基于感應無線技術的車地通信調制解調器設計方案,以TMS320F28335芯片為核心設計了一種DPSK解調器實現車地通信。
1 感應無線數據通信原理
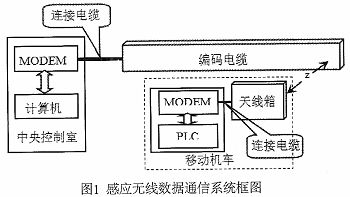
圖1給出了感應無線數據通信系統的結構框圖。系統主要由中央控制室的調制解調器、編碼電纜、機車上的天線箱和調制解調器構成。天線箱由接收線圈和發送線圈構成,編碼電纜中具有通信用傳輸對線。編碼電纜安裝在機車軌道旁邊,在機車行走過程中,安裝在機車上底部的天線箱跟隨機車移動,并始終與編碼電纜保持 5-20cm距離,數據通信就是通過安裝在移動機車上的天線箱中線圈與敷設在地面軌道旁的編碼電纜中的通信傳輸對線之間近距離電磁耦合傳遞信息,天線箱與編碼電纜之間形成了一個距離很短的無線通信信道,實現中央控制室與移動機車之間的數據通信。
為了抑制干擾,特別是抑制同頻干擾噪聲(機車上的變頻調速裝置產生的且與感應無線數據通信載波頻率相同或相近的諧波),編碼電纜通信傳輸對線和車上接收天線均采用交叉結構,衰減干擾噪聲,天線箱線圈與編碼電纜中通信傳輸對線結構如圖2所示。
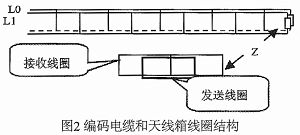
假設每個天線線圈或者編碼電纜網孔寬度為,發送線圈中心偏離L0和L1的中心分別為,d0,d1。r=d0+d1由于天線箱線圈和編碼電纜之間距離短,可以把它們之間的磁場看成是均勻磁場。若發送線圈中激勵電流為i=Imsinωt,則L0和L1的合成感應電動勢e為:
![]()
其中Emax為發送線圈中心和L0或L1線圈網孔中心重合時,感應電動勢達到的最大值。
2 硬件設計
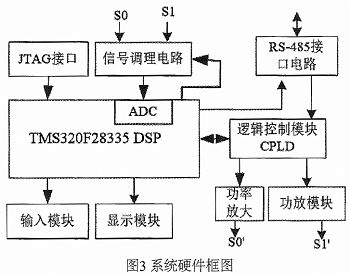
從硬件角度而言,整個系統包括主要包括TMS320F28335 DSP、CPLD控制模塊(DPSK調制模塊)、信號調理電路、功率放大模塊、RS-485通信接口、輸入輸出模塊、JTAG接口以及電源管理模塊等。圖 3所示為系統的硬件設計框圖。其中S0、S1是無線感應信號,是已調信號。
由于調制部分相對容易,下面重點闡述解調部分硬件電路和軟件設計設計。
2.1 主控模塊
該車地通信系統的主控模塊選用的是32位的高性能DSC芯片TMS320F28335,主頻達150MHz,片上帶有256K字FLASH,34K字 SARAM,1K字OTPROM。片上集成了3個32位CPU定時器,16通道12位高速ADC,6通道的DMA控制器,以及UART、SPI、PWM、 GPIO等,片上外圍設備資源豐富。
在該系統中,TMS320F28335 DSP主要工作有:在解調時,控制其片上12bit ADC進行采樣,根據ADC采樣的信號控制程控放大器(PGA)將感應信號調理到適合的幅度,對采樣后信號進行數字處理與軟件解調,解調后的信號通過 RS-485總線送給上位機。在調制時,DSP通過中斷方式接收RTS以及每幀數據的起始位,產生控制信號控制CPLD構成的調制模塊輸出DPSK脈沖信號,用戶可以通過按鍵、顯示器等人機交互設備完成通信參數的配置。
2.2 感應信號放大模塊
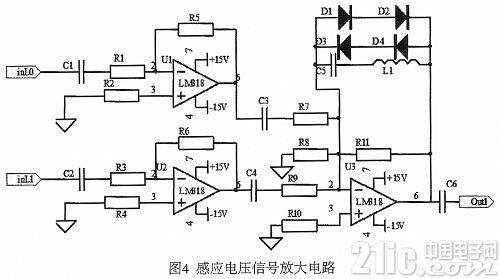
兩路經過天線箱線圈或者編碼電纜感應接收信號inL1與inL0經過運放U1和U2構成的反相放大電路完成阻抗匹配和放大后,經由U3構成的反相加法電路實現inL1和inL0兩路信號的矢量合成,且經D1,D2,D3,D4,C5,L1構成雙向限幅電路與濾波。該基本放大電路輸出送PGA模塊進一步放大。
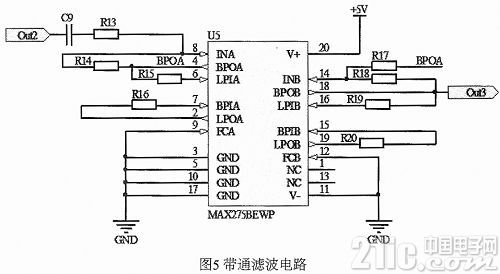
2.3 有源帶通濾波電路
由于在工業現場環境復雜,干擾較多,因此在模擬前端設計了基于開關電容濾波芯片MAX275的4階帶通濾波器,如圖5所示。該帶通濾波器設計指標為:中心頻率約為79k Hz,品質因數Q約為10,增益約為1.31。
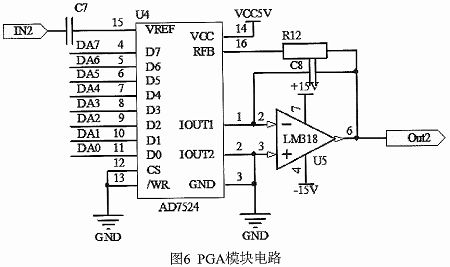
2. 4 程控放大模塊
由于軌道機車在運動中天線箱和編碼電纜之間的相對位置是變化的,感應信號幅度不穩定,因此在信號調理模塊中使用了程控放大器,使感應信號幅度保持相對穩定。程控放大模塊采用了D/A轉換器AD7524與運放LM318構成,如圖6所示。
假定DSP提供給AD7524的當前控制量為,當前的ADC對信號幅度平均采樣值為,PGACon_Now,ADCSamp_Now假設需要將信號幅度(即ADC采樣值)控制在ADCSamp_Max和ADCSamp_ Min之間,其中值為ADCSamp_Med,滿足:
ADCSamp_Med=(ADCSamp_Min+ADCSamp_Max)/2 (2)
當采樣幅度超出其限度時,DSP產生新的控制量算法為:
![]()
2.5 電平轉換模塊
由于帶通濾波器的輸出是雙極性交流信號,而TMS320F28335片上ADC要求的輸入是單極性信號,且電壓范圍在0~3V,因此帶通濾波器的輸出不能直接作為ADC的輸入,需要將帶通濾波器的輸出進行電平轉換才能送ADC。圖7所示為電平轉換電路,將交流信號電平提升1.5V,使VAIN0符合ADC 輸入要求。是帶通濾波輸出,范圍在-1.5V~+1.5V。R 21,R22采用精密電阻,其中R22=1KΩ,R21=1.2KΩ。

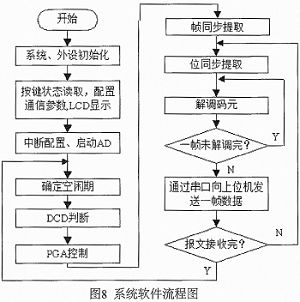
3 軟件設計
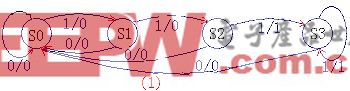
系統軟件主要包括上電后系統與外設初始化、檢測按鍵狀態完成對通信參數的配置、中斷配置以及解調算法模塊等。其中中斷主要包括CPU定時器0和1中斷,外部中斷1和2中斷等,它們主要用于提供CPLD構成的DPSK調制電路控制時序。解調算法主要包括確定空閑期、DCD確定、PGA控制、幀同步和位同步提取等算法。系統軟件流程圖如圖8所示。
為了提高系統的可靠性與抗干擾能力,應用了TMS320F28335片上看門狗,在軟件中安排喂狗指令,若系統出現死機等,定時周期內沒有喂狗,看門狗復位系統,避免系統出現一直處于死機狀態。
4 總結
該系統設計在軟硬件設計上均采用了抗干擾設計,提高了系統的穩定性與抗干擾能力。設計中采用TI公司TMS320F28335 DSP芯片為核心,通過軟件無線電方式實現DPSK解調,實現工業機車與控制中心的實時數據通信,系統升級只是軟件的升級,對工業機車自動化具有重要意義。目前,該系統經過實際測試,具有三種通信速率(2400bps,4800 bps,9600bps),自動增益控制,誤碼率低于,完全兼容目前的同類產品。


評論