差動(dòng)變壓器位移測(cè)量裝置在機(jī)械天平中的應(yīng)用

摘要:對(duì)線性差動(dòng)變壓器(LVDT)及其信號(hào)處理芯片AD598的工作原理進(jìn)行了分析,利用差動(dòng)式位移傳感器和AD598芯片設(shè)計(jì)了具有調(diào)零功能的位移信號(hào)調(diào)理電路,并將其應(yīng)用在機(jī)械天平中,將機(jī)械位移信號(hào)轉(zhuǎn)化為電信號(hào)。改裝后的機(jī)械天平具有讀數(shù)直觀,使用便捷的特點(diǎn)。
關(guān)鍵詞:差動(dòng)變壓器;AD598芯片;機(jī)械天平
0 引言
天平是我們?nèi)粘I钪谐S玫挠?jì)量器具之一,也是計(jì)量部門進(jìn)行質(zhì)量量值傳遞不可缺少的重要計(jì)量器具,其性能好壞直接影響質(zhì)量量值傳遞的可靠性,其中機(jī)械天平是一種傳統(tǒng)的仍被廣泛應(yīng)用的精密儀器。
傳統(tǒng)機(jī)械天平使用時(shí),依靠觀察機(jī)械式指針左右擺幅是否一致來判斷天平平衡,準(zhǔn)確測(cè)量出指針擺動(dòng)的幅度是關(guān)鍵。機(jī)械天平兩個(gè)秤盤中重量的差引起指針擺幅變化,這種指針擺幅的變化可視作微位移量,尋找一種方法將這種微位移擴(kuò)大,利于提高天平精度。差動(dòng)變壓器式位移傳感器(LVDT)是一種靈敏度較高的互感式傳感器。具有分辨力高、穩(wěn)定性好、精度高、溫度影響小等良好特性。
本文在傳統(tǒng)LVDT式位移傳感器的基礎(chǔ)上,使用AD598芯片來設(shè)計(jì)位移傳感器電路,并將位移傳感器應(yīng)用在機(jī)械天平上對(duì)其進(jìn)行改進(jìn),使用位移傳感器和電流表代替原來的機(jī)械式指針和金屬讀數(shù)標(biāo)盤。
1 位移傳感器工作過程
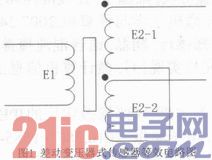
差動(dòng)變壓器式傳感器是把被測(cè)位移量轉(zhuǎn)換為一次線圈與二次線圈間的互感量M的變化的裝置。當(dāng)一次線圈接入激勵(lì)電源之后,二次線圈就將產(chǎn)生感應(yīng)電動(dòng)勢(shì),當(dāng)兩者間的互感量變化時(shí),感應(yīng)電動(dòng)勢(shì)也相應(yīng)變化。由于兩個(gè)二次線圈采用差動(dòng)接法,故稱為差動(dòng)變壓器。等效電路圖如圖1所示。
將LVDT式位移傳感器中的銅片固定在機(jī)械天平的指針上,如圖2所示。
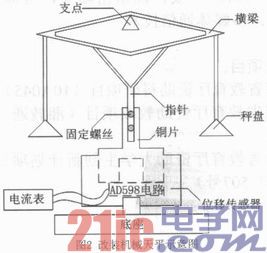
機(jī)械天平兩個(gè)秤盤中重量的差引起指針擺幅變化,銅片也隨指針左右擺動(dòng),通過位移傳感器將機(jī)械位移量轉(zhuǎn)化為電量。位移傳感器次邊輸出電壓通過AD598電路檢測(cè)后,最終由電流表顯示。
2 AD598芯片工作原理
AD598是一種完整的單片式線位移差動(dòng)變壓器信號(hào)調(diào)節(jié)系統(tǒng)。AD598與LVDT配合,能夠直接將LVDT的機(jī)械位移量轉(zhuǎn)化成為單極性或雙極性輸出的高精度直流電壓。AD598芯片同時(shí)具有交流信號(hào)的放大、相敏檢波器、直流信號(hào)放大、產(chǎn)生正弦波振蕩器、濾波電路等功能,在外圍電路的構(gòu)造中只要增加幾個(gè)外接無源元件,就能確定激磁頻率和輸出電壓的幅值。
AD598芯片原理圖如圖3所示,該芯片主要包含兩部分:一部分為正弦波發(fā)生器,它的頻率及幅值均可由少數(shù)外接元件確定;另一部分為LVDT次級(jí)的信號(hào)處理部分,通過這一部分產(chǎn)生一個(gè)與鐵芯位移成正比的直流電壓信號(hào)。
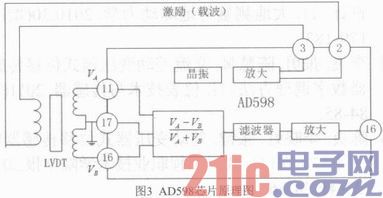
AD598既可驅(qū)動(dòng)高達(dá)24 V、頻率范圍為20 Hz~20 kHz的LVDT原邊線圈,又可接收最低為100 mV的次級(jí)輸入,所以適用于許多不同類型的LVDT。ADS98芯片工作時(shí),輸出的正弦波直接作用于差動(dòng)變壓器的初級(jí)線圈;而傳感器次級(jí)線圈輸出的兩個(gè)正弦波則可直接作為AD598的輸入,AD598對(duì)它們進(jìn)行處理,產(chǎn)生一個(gè)標(biāo)定的單極性或雙極性直流電壓信號(hào),其傳遞函數(shù)為:
![]()
其中VA,VB為傳感器次級(jí)線圈輸出的兩個(gè)正弦波電壓;IREF為參考電流,一般取為500 μA;R2為輸出電壓調(diào)節(jié)電阻。
3 傳感器信號(hào)調(diào)理電路
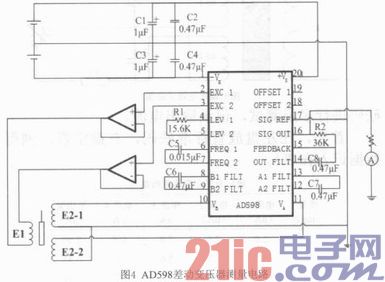
將LVDT與AD598連接在一起,再配上一些電阻器和電容器,就組成一個(gè)精密位移傳感器。如圖4所示。
3.1 參數(shù)選擇
雙端供電情況下,參數(shù)選擇過程如下:
(1)確定測(cè)量系統(tǒng)的機(jī)械頻帶:fSUBSYSTEM;
(2)選擇LVDT的激勵(lì)頻率:fEXCITATION=10×fSUBSYSTEM;
(3)確定LVDT次級(jí)電壓和VA+VB:用典型的激勵(lì)電壓VPRI激勵(lì)LVDT,將鐵芯移動(dòng)到中間零點(diǎn)位置時(shí),測(cè)出VA和VB值并求和;
(4)確定最佳激磁電壓VEXC:在LVDT初級(jí)加上典型激勵(lì)電壓VPRI,然后將鐵芯放在滿量程位置,測(cè)出次級(jí)最大輸出電壓VSEC,確定出LVDT的電壓轉(zhuǎn)換比VTR;
VTR=VPRI/VSEC (2)
VEXC=VSEC×VTR (3)
(5)對(duì)于雙端供電,查閱AD598芯片手冊(cè),根據(jù)VEXC確定電阻R1;
(6)確定激磁電壓頻率C1:C1=35 μF×Hz/fEXCITATION;
(7)選擇確定激磁電壓頻率的電容C2、C3和C4,C2=C3=C4=10-4F×Hz/fSUBSYSTEM;
(8)選擇決定AD598增益和滿量程輸出電壓范圍的電阻R2。
R2=VOUT×(VA+VB)/(S×VPRI×500 μA×d) (4)
3.2 調(diào)零電路
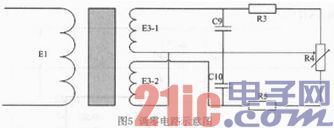
實(shí)際應(yīng)用中發(fā)現(xiàn),鐵芯位于LVDT中心處時(shí),輸出電壓并不為零。其原因是初級(jí)線圈與次級(jí)線圈之間存在有與鐵芯位置無關(guān)的雜散電容,以及繞組和磁路中缺少對(duì)稱性。此外,傳感器安裝在機(jī)械天平的過程中也不能保證完全的對(duì)稱性。為此設(shè)計(jì)了如圖5所示的調(diào)零電路,即在原來激勵(lì)線圈的基礎(chǔ)上,在副邊增加了E3-1和E3-2調(diào)整線圈,實(shí)現(xiàn)了調(diào)零功能。
4 實(shí)驗(yàn)
微位移信號(hào)檢測(cè)電路調(diào)試后,安裝在機(jī)械天平上,分別用10mg、20mg、30mg、40mg、50mg標(biāo)準(zhǔn)砝碼進(jìn)行多組測(cè)試,記錄輸出電流。
首先,在左盤放置標(biāo)準(zhǔn)砝碼,右盤空置,測(cè)得數(shù)據(jù)記入在表1。

在右盤放置標(biāo)準(zhǔn)砝碼,左盤空置,重新用相同質(zhì)量的砝碼進(jìn)行檢測(cè),測(cè)得數(shù)據(jù)記入在表2,針對(duì)表1、2數(shù)據(jù),對(duì)質(zhì)量和相應(yīng)的平均電流進(jìn)行曲線擬合,以天平左右托盤中砝碼的質(zhì)量差作為曲線橫坐標(biāo),輸出電流作為縱坐標(biāo),從圖6可以看出,質(zhì)量與電流基本符合比例關(guān)系。通過調(diào)零電路進(jìn)行調(diào)節(jié),零點(diǎn)輸出電流近似為零,兩條直線斜率絕對(duì)值基本一致,曲線近似于V字型。

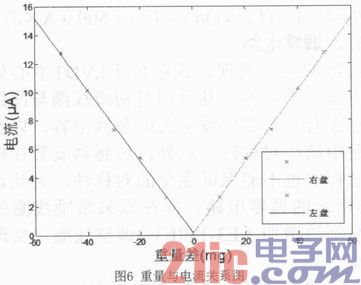
針對(duì)表1、2數(shù)據(jù),運(yùn)用Matlab對(duì)數(shù)據(jù)進(jìn)行擬合得到方程:
y(μA)=0.2514x(mg)+0.086 (5)
y(μA)=-0.2508x(mg)+0.112 (6)
5 結(jié)論
在機(jī)械天平基礎(chǔ)上,使用AD598芯片和差動(dòng)位移傳感器設(shè)計(jì)微位移檢測(cè)電路,通過位移檢測(cè)電路將天平指針的擺幅位移信號(hào)放大并轉(zhuǎn)化為電信號(hào),并在傳感器中加入補(bǔ)償繞組,使用調(diào)零電路。運(yùn)用標(biāo)準(zhǔn)砝碼進(jìn)行實(shí)際稱重測(cè)試發(fā)現(xiàn)改裝后天平重復(fù)性較好,使用更加直觀,便捷,具有提高最小分度值的潛力。




評(píng)論