一種用于水聲通信的快速自適應均衡器設計

水聲通信是當代海洋資源開發和海洋環境立體監測系統中的重要組成部分,隨著水下軍事及民用數據通信量的日益增加,通過水聲信道進行數據傳輸的要求越來越高。在隨機時變多途傳播的水下聲信道中,如何實現可靠通信是對通信和信號處理技術的嚴重挑戰。為克服水聲信道的多徑衰落效應引起的碼間干擾,水聲相干通信中普遍采用信道均衡技術。傳統的線性均衡器是采用由發射機發送訓練序列來輔助實現信道的估計和均衡,這在寬帶資源有限的水聲信道中效率較低,因此需要性能更強的判決反饋均衡器來均衡,而盲均衡器是信道均衡的良好選擇,與其它傳統的自適應均衡器相比,其無需參考輸入的訓練序列,僅依靠接收信號本身和發射信號先驗信息對信道特性進行均衡補償,大幅提高了載波恢復和相位信號檢測的能力。在各類盲均衡算法中,Godard和Treichler等人提出的恒模算法(CMA)以其計算復雜度低、易于實時實現和較好的魯棒性等優點得到了廣泛應用。本文在分析傳統CMA盲均衡算法收斂性能的基礎上,針對算法采用固定步長使得收斂速度和收斂精度之間相互制約的缺點,提出了一種利用時變步長來代替固定步長的自適應變步長CMA盲均衡算法,并進行了計算機仿真及湖試的數據分析。結果表明,改進算法收斂速度快、剩余誤差小,能夠克服實際水聲信道傳輸引起的相位偏移,具有較廣的實際應用價值。
本文引用地址:http://www.104case.com/article/201610/306312.htm1 恒模算法原理及性能分析
恒模算法是Bussgang類盲均衡算法中常用的一種,其通過調節線性均衡器的抽頭增益來達到使代價函數減小的目的。恒模算法的基本原理是,先建立一個代價函數,使理想系統對應于代價函數的極小值點,然后采用某種自適應算法尋找目標函數的極值點,所以自適應算法性能的好壞較大程度上影響著系統的均衡效果。圖1為判決反饋盲均衡器示意圖。其中,x(n)是發送序列;h(n)是未知信號的沖激響應;y(n)為系統接收序列,同時也是盲均衡器的輸入序列;n(n)為噪聲信號;w(n)為盲均衡器的沖激響應,通常采用有限長橫向濾波器,
為被均衡器恢復的信號;
為判決輸出信號;e(n)為均衡器輸出信號相對于估計值的誤差。
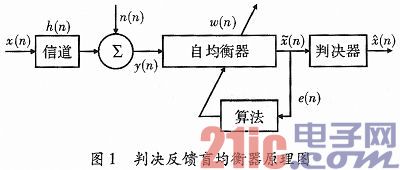
根據信號傳輸理論和圖1可知,均衡器的輸入為
由上式可以看出,步長因子μ在算法收斂過程中起著重要作用,當采用大步長時,每次調整抽頭系數的幅度就大,算法收斂速度和跟蹤速度加快,但當均衡器抽頭系數接近最優值時,抽頭系數將在最優值附近一個較大范圍內來回抖動而無法進一步收斂,因而會有較大的穩態剩余誤差和誤碼率。反之,采用小步長抽頭系數每次調整的幅度則小,穩態剩余誤差較小,同時算法的收斂速度和跟蹤速度也會相應減慢,由此可見,傳統CMA算法由于采用固定步長時,使得算法的收斂速度和收斂精度相互制約。
2 改進的恒橫算法
針對原始算法在收斂速度和收斂精度相矛盾的缺陷,為進一步提高CMA算法的性能,提出了一種將剩余誤差MSE的一種變換作為控制步長參量的變步長恒模算法,其具體實現如下:
考慮剩余均方誤差MSE為

顯然MSE(n)在收斂條件下隨迭代次數的增加而減小,因此通過MSE對步長因子的控制可以達到變步長算法的要求。于是權值迭代公式變為

式中,V(n)為權值誤差矢量;β為比例因子,用于控制步長μ(n)的取值范圍,顯然當算法收斂后,MSE(n)趨于一個微小的值。用MSE控制步長的優勢在于,當信道中有突發強干擾信號時,e(n)變大,但通過加窗取平均,就可以削弱干擾信號的影響,使MSE變化較小,這樣可以減小因步長變化過大而引起的誤調,故用其控制步長變化能滿足自適應步長的要求。
3 仿真及實驗分析
3.1 仿真分析
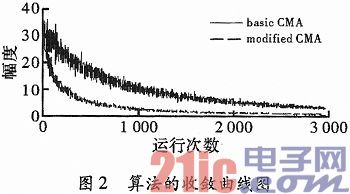
為驗證改進算法的性能,通過計算機仿真上述算法,并與原始算法進行了比較。仿真條件:輸入信號分別采用32QAM調制方式,信噪比為20 dB,波器階數為13,實驗運行總次數為3 000次,信道的沖擊響應為H1(z)=0.005+0.009z-1-0.024z-2+0.854z-3-0.218z-4+0.049z-5-0.016z-6。
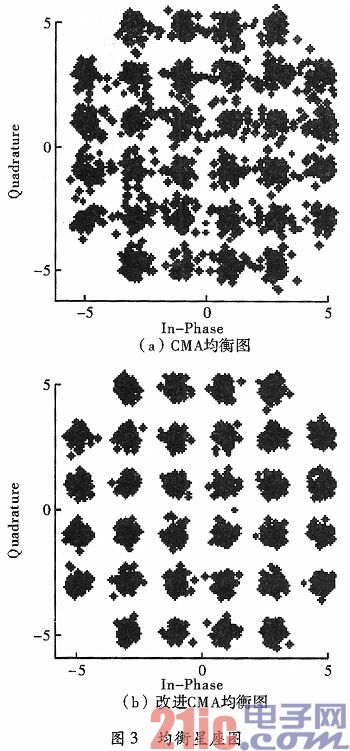
圖2給出了改進算法和原始算法的收斂曲線,從圖中可以看出,在穩態誤差基本相等的情況下,改進算法的收斂速度明顯快于基本算法,而當收斂速度相同時,改進算法的穩態誤差要小于基本算法的穩態誤差。同時從均衡前后的星座圖可以看出,改進算法進行均衡后的星座更加集中、清晰,分離效果更明顯,具有更小的穩態剩余誤差和誤碼率。
3.2 試驗數據分析
通過仿真驗證了改進算法具有更好的均衡效果,在算法設計實現后,將其應用于水聲通信信道的試驗,為直觀起見,湖試數據以圖像數據為主,數據接收后,對數據進行相關檢測、解調、均衡、解碼等處理,恢復出圖像。圖4和圖5給出了均衡前后的星座圖和圖像信息,從圖中可以看出,受到多徑衰落等惡劣環境因素的干擾,不進行信道均衡時接收圖像已嚴重失真,且星座圖重疊模糊。當采用原始CMA算法進行信道均衡后,星座圖已逐漸分開,取得較明顯的圖像恢復效果,但是圖像有失真現象,誤碼率較高。而采用改進算法恢復的圖像,圖像能夠清晰地被還原,星座圖各部分已完全分離,最低失真度的恢復了圖像,誤碼率達到10-3的量級,進一步證明了上述結論。

4 結束語
信道均衡是高速水聲通信系統中克服碼間干擾的一項關鍵技術,如何提高均衡器的性能是目前研究的熱點課題。本文分析了盲均衡器的特點,提出了一種利用時變步長來代替固定步長的自適應CMA盲均衡算法,并進行了計算機仿真及試驗測試。結果表明,改進算法收斂速度快、剩余誤差小,具有較好的均衡效果,能夠有效抑制實際水聲信道的碼間串擾,同時可以廣泛地應用于數字通信、雷達和圖像處理等盲信號處理領域。

評論