基于Blackfin561的嵌入式車牌識(shí)別系統(tǒng)

摘要 介紹了一種基于雙核DSP Blackfin561的嵌入式車牌識(shí)別系統(tǒng)。討論了系統(tǒng)的硬件結(jié)構(gòu)和軟件實(shí)現(xiàn)流程,以及基于Hpofield神經(jīng)網(wǎng)絡(luò)進(jìn)行車牌識(shí)別的方法及過(guò)程。首先對(duì)視頻圖像進(jìn)行解碼,以獲取圖像的亮度信號(hào);然后通過(guò)圖像處理方法對(duì)圖像進(jìn)行調(diào)整、定位、分割等處理;最終運(yùn)用Hopfield神經(jīng)網(wǎng)絡(luò)識(shí)別出車牌上的字符信息。
本文引用地址:http://www.104case.com/article/201610/305857.htm隨著科技與經(jīng)濟(jì)的發(fā)展,汽車數(shù)量也逐漸增多,交通管理問(wèn)題日漸嚴(yán)峻。如何建立一個(gè)科學(xué)有效的交通管理系統(tǒng)是交通管理的重點(diǎn)。智能交通系統(tǒng)(TTS)隨著科技的興起,是未來(lái)交通管理發(fā)展的必然趨勢(shì),也是電子信息技術(shù)的一個(gè)前沿課題。車牌識(shí)別系統(tǒng)(License Plate Recognition System,LPRS)是智能交通系統(tǒng)的重要組成部分,在自動(dòng)化管理、信息統(tǒng)計(jì)、車輛跟蹤等方面均具有重要意義。雖然國(guó)外在LPRS上已取得了較好的效果,而國(guó)內(nèi)因起步較晚,目前仍需要對(duì)眾多的相關(guān)技術(shù)進(jìn)行深入的研究與實(shí)現(xiàn)。
基于Blackfin561的LPRS替代了人工識(shí)別車牌的角色,這可節(jié)省大量人力物力。本文討論的LPRS可用于高速收費(fèi)站口及小區(qū)門口,以實(shí)現(xiàn)車流量統(tǒng)計(jì)和車輛跟蹤等功能。
1 系統(tǒng)的總體設(shè)計(jì)與架構(gòu)
嵌入式車牌識(shí)別系統(tǒng)是一個(gè)能夠完成車牌識(shí)別與信息處理的獨(dú)立系統(tǒng),整個(gè)系統(tǒng)包括視頻采集模塊,圖像處理模塊與通訊模塊。系統(tǒng)的軟件設(shè)計(jì)包括道路圖像的采集、圖像預(yù)處理、車牌定位、字符分割,字符識(shí)別和結(jié)果發(fā)送6大部分。
1.1 基于DSP的嵌入式車牌識(shí)別系統(tǒng)
由于DSP強(qiáng)大的數(shù)據(jù)處理能力,使得它在嵌入式圖像處理領(lǐng)域占據(jù)了重要地位,尤其是雙核DSP,更是在視頻處理應(yīng)用中上升勢(shì)頭迅猛。基于DSP的嵌入式車牌識(shí)別系統(tǒng)一般采用主機(jī)與DSP分布式處理結(jié)構(gòu),其優(yōu)點(diǎn)是價(jià)格低、可靠性好、便于升級(jí)。系統(tǒng)的一般結(jié)構(gòu)主要分圖像采集、DSP處理和PC機(jī)數(shù)據(jù)管理3部分,其系統(tǒng)結(jié)構(gòu)如圖1所示。
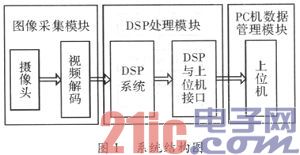
圖像采集模塊包括視頻的輸入部分與圖像的提取部分,其功能是通過(guò)CCD攝像頭采集亮度信號(hào),輸出模擬的復(fù)合視頻電信號(hào),并通過(guò)視頻解碼芯片解碼出所需的數(shù)字圖像信號(hào)。DSP處理模塊主要由DSP處理器及其外圍電路,外部存儲(chǔ)器以及與主機(jī)的接口電路組成。其中外部存儲(chǔ)器用來(lái)存儲(chǔ)圖像的大量數(shù)據(jù),供DSP處理器調(diào)用。與主機(jī)的通訊接口常用的有UART、PCI、USB和以太網(wǎng)等。由于系統(tǒng)通常要考慮其自身的擴(kuò)展性、終端與主機(jī)的遠(yuǎn)距離通信、布線的難易程度等因素,故以太網(wǎng)應(yīng)用較為普遍,但缺點(diǎn)就是在無(wú)集成以太網(wǎng)功能的DSP上,需外加芯片,提高了系統(tǒng)的成本。PC機(jī)數(shù)據(jù)管理模塊因系統(tǒng)應(yīng)用的目的不同而異,主要包括人機(jī)交互界面和數(shù)據(jù)庫(kù)與相應(yīng)的處理機(jī)制。
1.2 系統(tǒng)硬件構(gòu)架
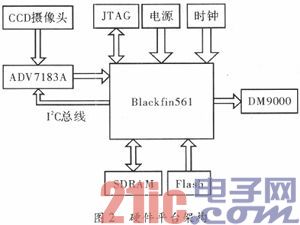
基于Blanckfin561的車牌識(shí)別硬件平臺(tái)架構(gòu)如圖2所示,主要包括ADI公司的Blackfin561處理器,ADV7183A視頻解碼芯片、Flash、SDR AM以及DM9000。Blackfin561通過(guò)I2C總線對(duì)ADV7183A進(jìn)行復(fù)位及初始化與工作模式的配置。視頻信號(hào)由Blackfin561的并行外部接口(PPI)采集,并存儲(chǔ)到外部SDRAM,Blackfin561對(duì)圖像數(shù)據(jù)進(jìn)行計(jì)算,輸出的識(shí)別結(jié)果通過(guò)DM9000傳輸?shù)缴衔粰C(jī)進(jìn)行后續(xù)處理。
1.3 系統(tǒng)軟件設(shè)計(jì)
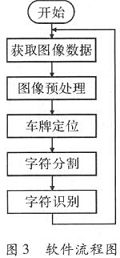
車牌識(shí)別系統(tǒng)的軟件流程如圖3所示,主要包括圖像采集、圖像預(yù)處理、車牌定位、字符分割和與上位機(jī)通訊等模塊。
1.3.1 圖像采集
系統(tǒng)加電后,DSP通過(guò)I2C總線對(duì)ADV7183A的寄存器進(jìn)行配置,對(duì)攝像頭采集到的模擬視頻信號(hào)進(jìn)行解碼,輸出YCrCb為4:2:2格式的數(shù)字視頻信號(hào)。由于算法只處理亮度信號(hào),故通過(guò)二維DMA采取間隔2 Byte采1Byte的方法,只提取Y通道的亮度信號(hào)存入到SDRAM中,同時(shí)在SDRAM中采用乒乓存儲(chǔ)機(jī)制存儲(chǔ)連續(xù)的兩幀圖像,使系統(tǒng)能夠達(dá)到實(shí)時(shí)處理的要求。
1.3.2 圖像預(yù)處理
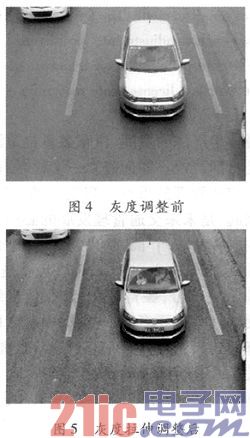
由于采集到的圖像會(huì)因?yàn)樘鞖狻④嚺普麧嵍群凸饩€等因素造成圖像被噪聲污染,導(dǎo)致圖像質(zhì)量下降,這會(huì)給后續(xù)的識(shí)別工作帶來(lái)麻煩。因此,需對(duì)采集到的原始圖像進(jìn)行必要的預(yù)處理,以提高圖像的信噪比,并使灰度值和對(duì)比度達(dá)到理想狀態(tài)。由于去噪點(diǎn)的算法會(huì)不同程度地使圖像邊緣變模糊,不利于后續(xù)車牌的定位,故將去噪工作放到車牌定位之后。這里預(yù)處理主要是通過(guò)直方圖均衡法調(diào)整圖像的灰度范圍與對(duì)比度,達(dá)到圖像增強(qiáng)的目的。處理前后的對(duì)比效果如圖4和圖5所示。
1.3.3 車牌定位
根據(jù)道路與攝像頭的相對(duì)位置,車速范圍以及道路寬度信息等,可預(yù)先判定車牌在攝像頭坐標(biāo)系中出現(xiàn)的范圍,這便可以大幅減小運(yùn)算量。在預(yù)定車牌檢測(cè)區(qū)域內(nèi),通過(guò)大率法對(duì)圖像進(jìn)行二值化,然后進(jìn)行形態(tài)學(xué)運(yùn)算中的開運(yùn)算與閉運(yùn)算,得到如圖6所示的圖像。對(duì)圖像進(jìn)行豎直投影,尋找白色像素點(diǎn)最多的一行,之后以這一行為中心向兩邊尋找邊界,找出車牌的上下邊。對(duì)縱坐標(biāo)在上下邊范圍內(nèi)的圖像進(jìn)行水平投影,尋找連續(xù)的白色區(qū)域,以確定左右邊界。兩次尋找邊界時(shí)均要結(jié)合車牌大小的先驗(yàn)尺寸知識(shí)來(lái)確定車牌的區(qū)域,若不符合尺寸要求則排除此次找出的區(qū)域并重新尋找。
1.3.4 字符分割
根據(jù)車牌的邊界信息提取出車牌區(qū)域的原始亮度數(shù)據(jù),對(duì)車牌區(qū)域再用大率法進(jìn)行二值化。這樣可消除圖像其他部分對(duì)車牌灰度范圍的影響。然后對(duì)二值化后的圖像進(jìn)行水平投影,根據(jù)車牌字符的寬度來(lái)對(duì)車牌字符進(jìn)行分割。再對(duì)每個(gè)分割出的字符進(jìn)行豎直投影,并依據(jù)車牌字符高度尺寸來(lái)去掉上下的黑邊,得到待識(shí)別的字符圖像,如圖7所示。












評(píng)論