定形機排氣濕度監控系統設計

摘要:設計一種基于嵌入式系統的定形機排氣濕度監控系統。重點介紹了排氣濕度的檢測方法以及硬件系統的組成,運用了模糊PID算法,在ARM上實現了移植Linux系統和設備驅動,最終能夠在觸摸屏上實時顯示排氣濕度參數。通過研究表明:該系統具有很好的穩定性,控制精度高,布匹后整理品質好,節省能源,具有非常廣泛的應用前景。
本文引用地址:http://www.104case.com/article/201610/305590.htm紡織印染行業中,織物的后整理對產品質量的提高有著重要的影響,定形過程中合適的內部濕度能使織物達到最佳的品質,一般根據不同布料大約控制在50%~70%之間,如果濕度控制不好,會導致生產布料出現嚴重的質量問題,同時過烘會造成大量能源浪費。為了更好地實現工藝要求,通過監測排氣濕度來控制定形機內部的水蒸氣含量。目前,不少企業仍然在采用較為簡單的手動調節方式,通過調節排氣管上閥門的開度來控制內部的濕度。對此我們設計了一套排氣濕度監控系統,能夠實時、在線地檢測排氣濕度,并加以控制,既能保證定形機的正常運行,又能最大地節省能源。本文通過采用參數自整定模糊PID控制的嵌入式系統對拉幅定形機的排氣濕度進行實時檢測與控制,利用專家的經驗知識,模擬人的控制行為,實現一種專家式的非線性控制。
1 檢測方法
織物在定形過程中會產生大量的水蒸氣,同時也要帶走大量熱能,造成能源浪費。為了測量排氣中水分含量,在定形機排氣口安裝了二氧化鋯(ZrO2)測濕傳感器,通過檢測氣體中氧的比例進而得到水蒸氣的含量,之后將采集到的濕度信號送入到處理器中計算出排氣風扇的最佳轉速,達到廢氣最佳排濕量,以獲得更好的節能效果。
排氣濕度的預設值通過U盤讀到嵌入式系統的數據庫,根據不同織物對于定形機的工藝要求以及節能的指數,利用模糊PID算法求出排氣風機的相應轉速,系統的觸摸屏能夠顯示出當前的排氣濕度信息,同時對運行數據進行記錄,以便后期對數據的進行分析和應用。根據資料可知,在一定的排氣濕度范圍內,所消耗的成本指數與織物的蒸發能力存在某種特定的關系,排氣濕度值為20%左右時,是成本指數和蒸發能力的平衡點。高于這個參數值時,對織物的蒸發效率影響很小,但是所需成本呈指數倍增長;雖然低于20%時,成本能有效減少,但同時也影響了蒸發效率,達不到所要求的織物所需品質。
2 嵌入式ARM硬件系統的設計及實現
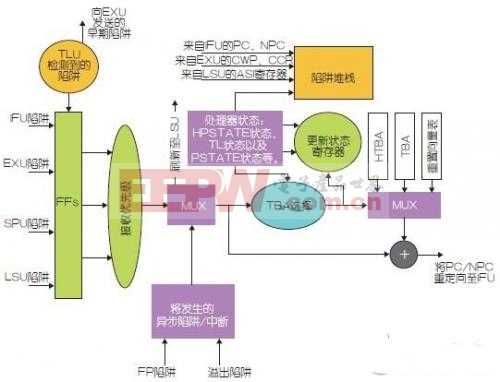
定形機排氣濕度監控系統,主要由測濕傳感器、現場控制設備、執行電機3個部分組成。在系統中,以ARM芯片作為嵌入式微處理器,利用二氧化鋯傳感器采集濕度信息、觸摸屏設置參數和顯示定形機的排氣濕度和現場時間。設計采用三星公司的S3C2440作為主控芯片,該處理器采用ARM9203T內核,自帶8路10位的ADC和觸摸屏接口,同時集成了USB、UART、JTAG等接口,符合設計要求,完全能夠實現監控系統的功能。控制系統結構框圖如圖1所示。
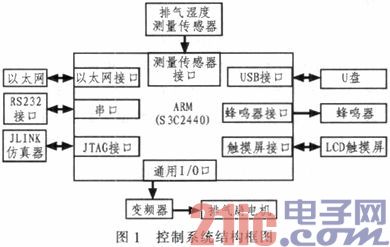
控制系統對采集回來的數據進行實時存儲和計算,可以控制排氣扇的轉速,以達到預期的控制效果。同時輸出的排氣濕度信息可以實時顯示在觸摸屏上,結合圖形應用軟件,可以繪成相關曲線。系統的數據存儲部分采用U盤作為整個系統的存儲媒介,存儲的數據可以為以后研究提供最佳的控制曲線。
3 控制方式選擇
對于排氣濕度這樣具有滯后性、非線性、時變性的控制對象,理論研究和工程實踐都充分證明了單純采用PID控制和模糊控制都很難取得較好的控制效果。而采用Fuzzy_PID復合控制方式是一種最佳的解決方案。
常規離散PID控制算法為
其中,k為采樣序號,T為采樣時間。
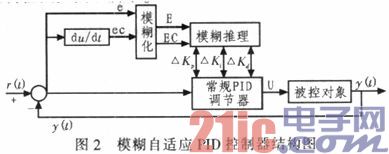
在監控系統的設計中,采用了模糊自適應PID控制,實現了PID參數的在線自適應功能,進一步完善了PID控制的最佳性能,在實際應用中取得了較好地效果。模糊自適應PID控制器以排氣濕度偏差e和偏差變化率ec為輸入,通過模糊控制規律對常規PID調節器的P、I、D參數進行自整定,其控制結構框圖如圖2所示。
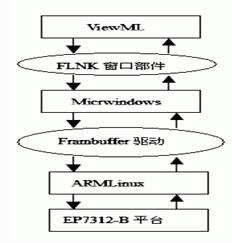
模糊PID控制器建立主要是根據專家經驗進行模糊規則的建立,模糊PID控制子程序流程圖如圖3所示。利用Matlab的Simulink模塊對常規PID算法和模糊PID算法進行比較分析,初始濕度值設置為0%,目標濕度值設置為20%,最后得到的系統響應曲線如圖4所示。
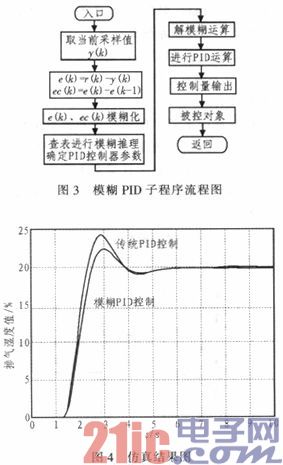
通過MATLAB仿真實驗分析兩種控制方法的效果對比來看,模糊自適應PID控制器具有超調量小、響應時間短,但是調節時間改善不明顯。模糊自適應PID控制器不僅保持了常規PID控制系統原理簡單、使用方便、魯棒性較強、控制精度高等優點,而且具有模糊控制的靈活性、適應性強等優點。
4 軟件系統設計及實現
軟件系統設計主要包括Linux操作系統的配置、移植,ARM控制程序的設計,基于QT的人機交互界面設計,以及硬件驅動的設計和加載,由于最后要在ARM中實現,需要構建交叉編譯環境。我們采取的方案是在Windows平臺下對QT應用程序進行開發,之后將程序源代碼復制到Linux操作系統中,利用QT的跨平臺特性,對程序進行重新構建。QT應用程序利用多種進程間通信的方法,實現調用控制程序的功能。軟件系統總體設計框圖如圖5。

4.1 操作系統和驅動的移植
嵌入式Linux操作系統可移植、實時性強、同時適用于不同的硬件平臺,能夠實現設計要求。系統需要多個設備驅動程序,包括ADC數據采集驅動、觸摸屏驅動以及PWM驅動。操作系統內核移植的主要過程就是對于內核代碼的正確修改,然后對內核進行配置以設置目標平臺和指定交叉編譯器路徑,最后進行編譯,以生成內核映像文件。其中主要是對Linux的內核的配置,包括對支持驅動的模塊加載,支持的S3C2440硬件平臺、網口、觸摸屏、U盤等,以上Linux內核配置已經能基本滿足本控制系統的要求,然后運行make dep,make clean,make zImage編譯指令則可生成新的內核映像文件,拷貝到目標板上即可運行。






評論