一種基于CAN總線和MiniGUI的虛擬儀表的實現

汽車儀表是駕駛員與車輛進行信息交流的重要接口和界面,它是安全行駛和經濟行駛不可缺少的裝置。早期,汽車上裝備的儀表均是通過機械結構模擬顯示,它們存在精度低、響應慢、顯示信息量少、信息顯示方式單一等缺點。隨著計算機技術的日漸成熟、汽車電子的發展、和嵌入式技術的廣泛應用,對儀表的數字化和多信息綜合顯示已成一種重要的發展趨勢。 本文將嵌入式計算機技術, 虛擬儀器技術和CAN總線數據傳輸技術引入到車載儀表中,設計、研制了嵌入式車載虛擬儀表。該儀表通過下位機各智能節點實時采集車況信息并通過 CAN 總線將各節點連接和進行數據傳輸。上位機將獲得的車況信息處理后,將常規信息顯示與異常信息顯示相結合,并充分發揮虛擬儀器功能與參數能自動定義、動態畫面可視性強的特點,采用模擬、數字等多種方式對工況信息進行綜合顯示,并對超限工況報警和自動記憶存儲,對汽車出現的各種異常情況給出緊急處理建議。
本文引用地址:http://www.104case.com/article/201609/304723.htm1 系統軟硬件平臺的選擇
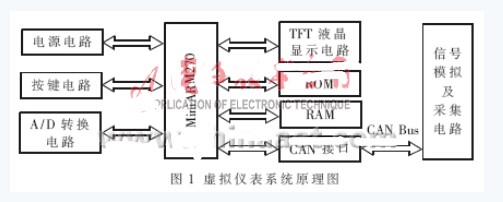
本文選取Intel公司的PXA270為微處理器,選配MiniARM270核心板;64 MB SDRAM為系統運行隨機存儲器;256 MB NAND Flash程序存儲器;MCP2515 CAN控制器負責CAN報文的接收與發送;8英寸640×480真彩TFT液晶屏顯示GUI圖形界面;Linux為嵌入式操作系統[2].選用目前較為流行的嵌入式GUI系統MiniGUI進行應用程序界面的編寫。運用ZLG/BOOT啟動Jflashmm、Flash FXP軟件進行內核的燒寫與移植。軟件編制調試完畢后,進行操作系統內核定制,裁減出最小操作系統,并將應用程序與最小系統在仿真環境下進行聯合調試。虛擬儀表系統結構如圖1所示。
2 MiniGUI的程序開發和移植
MiniGUI是由北京飛漫軟件技術有限公司創辦的開源Linux圖形用戶界面支持系統,經過近些年的發展,MiniGUI已經發展成為比較成熟的性能優良的、功能豐富的跨操作系統的嵌入式圖形界面支持系統。小是MiniGUI的特色,它目前已經廣泛應用于通訊、醫療、工控、電子、機頂盒、多媒體等領域。
將MiniGUI及應用程序移植到目標機上需要經歷編寫相應的驅動程序、交叉編譯MiniGUI及應用程序、安裝MiniGUI到目標系統、在目標系統上運行MiniGUI應用程序等幾個步驟。
MiniGUI程序是建立在MiniGUI和ANSIC庫之上,所以程序的編寫要按照MiniGUI的程序框架來定,并通過調用ANSIC庫以及MiniGUI自身提供的API函數來實現。MiniGUI程序的入口點: int MiniGUIMain(int argc,const cha r * argv [ ]) .其風格類似于Win32 ,也是基于窗口、事件驅動編程。事件通過消息機制傳遞,當事件發生時,MiniGUI將事件轉換為一個消息,并將消息發送到MiniGUI應用程序的消息隊列之中。窗口過程函數是MiniGUI應用程序必不可少的函數,用于接收和處理消息,是一個回調函數,由MiniGUI調用,在應用程序中不能直接調用,其函數原型如下:static int WindowProc (HWND hWnd, int message, WPARAM wParam,LPARAM lParam)。每個MiniGUI應用程序的初始界面一般都是MiniGUI主窗口,然后在主窗口的基礎上再建立子窗口或對話框等。主窗口使用 CreateMainWindow函數實現,在這個函數里可以設置主窗口的風格、大小、句柄、標題以及窗口過程函數等[6,8-9].
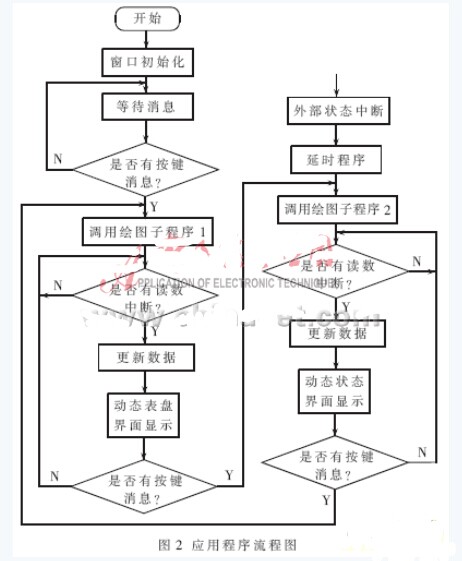
本文有兩個顯示界面,分別對應流程圖里面的子程序1和子程序2.應用程序流程圖如圖2所示。
本文采用arm-linux-gcc-3.4.3交叉編譯器對驅動程序和應用程序進行編譯。安裝交叉編譯器步驟:將交叉編譯器安裝包arm- linux-3.4.3.tar.bz2復制到當前目錄下,進行解壓安裝并指定安裝路徑:#tar xjvf arm-linux-3.4.3.tar.bz2 –C /usr/local/arm.為了便于使用,安裝完畢后,通常都將交叉編譯器的路徑添加到系統的搜索路徑中。這樣要編譯文件時就很簡單,不用每次都指定路徑,系統會自動搜索。在這里介紹的一種方法是修改/etc/profile文件:打開/etc/profile文件,在最后一行添加pathmunge /usr/local/arm/3.4.3/sbin,保存退出,在終端輸入執行:#. Profile(點+空格+文件名)。可通過在終端輸入:arm-linux-gcc–v 檢驗用戶編譯器版本。arm-linux-gcc編譯出來的程序,不能在PC機上運行,必須下載到ARM系統中才能運行。
MiniGUI在Linux系統中有兩種運行模式:fbcon(Frame Buffer Console)和qvfb(Qt Virtual Frame Buffer)。fbcon在控制臺下運行,這種模式下不能開Linux的X圖形界面。qvfb則是帶幀緩沖的虛擬控制臺,MiniGUI程序在qvfb 中運行就像圖形界面下的終端(Terminal)中運行命令一樣。通過對gal_engine賦值來設置運行模式。
3 信號采集電路
CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國際標準化的串行通信協議。在當前的汽車產業中,出于對安全性、舒適性、方便性、低公害、低成本的要求,各種各樣的電子控制系統被開發了出來。由于這些系統之間通信所用的數據類型及對可靠性的要求不盡相同,由多條總線構成的情況很多,線束的數量也隨之增加。
CAN總線的智能節點一般由主控制器、CAN總線控制器、CAN總線驅動器以及具體的功能單元組成。主控制器用來通過訪問CAN總線控制器來實現對CAN總線的訪問。CAN總線控制器實現CAN協議的數據鏈路層和物理層功能,對外具有與主控制器和總線驅動器的接口功能。CAN總線驅動器提供 CAN總線控制器與物理總線之間的接口。
本文選用Microchip公司生產的MCP2515作為CAN總線控制器。MCP2515是一款獨立的CAN協議控制器,完全支持CAN 2.0B技術規范。MCP2515與主控制器的連接是通過標準串行外設接口SPI(Searial Peripheral Interface)實現的。主控制器選擇了Microchip公司的PIC16F913,該單片機為高性能的RISC CPU,內部具有4 KB的可編程可擦除的Flash存儲器、256 B的RAM、256 B的EEPROM,帶有標準的SPI接口,也能夠方便地和CAN總線控制器MCP2515進行連接。CAN總線驅動器選擇Microchip公司的 MCP2551,是一個可容錯的高速CAN器件[4,10].數據采集用的CAN總線接口電路如圖3所示。





評論