基于AVR單片機的自行車行車記錄儀,包括軟硬件具體

2.3 實現的主要功能
顯示實時速度和平均速度
顯示總里程和單次行車里程
顯示時間和溫度
節電保護
行車信息存儲
用戶菜單UI界面
時間修改
輪徑設置,里程設置,等一些參數的設置
打印行車記錄統計信息
貪吃蛇小游戲
3. 硬件系統設計
3.1 主控板
主控板主要包括:CPU,Atmega64;時鐘芯片,DS1302;存儲芯片,24LC64;JTAG在線仿真接口;中斷獨立按鍵模塊;LED調試電路;12864液晶顯示接口;DS18B20溫度傳感器接口;霍爾傳感器接口;打印機驅動板接口。
對單片機的選擇主要有以下要求:
在存儲方面,使用的是ATMEL公司的AT24LC64 EEPROM存儲器,該小存儲器走的是IIC總線模式,雖然可以用一般的單片機模擬IIC總線,但是為了提高效率則必須選擇具有IIC總線接口的單片機,這個一般的51單片機已經不能滿足,所以需考慮其它單片機。
時鐘模塊,用的是達拉斯的DS1302芯片,只需普通的端口操作就能完成。
打印機模塊,有下面的打印機實現原理可知,我們必須選擇具有雙邊沿觸發的單片機,有這個功能的單片機ATMEL的AVR系列的中高端單片機能滿足,比如Atmega64及以上的單片機都具有這一功能。
霍爾傳感器,霍爾傳感器測速必須具有兩個內置外設,一個是外部下降沿中斷,一個是內部定時器。
內存空間要求:在做用戶界面以及制作貪吃蛇等游戲時都必須開很大的緩存,所以必須具備一定的內存容量,初步估計需要2K內存以上。
由以上幾點分析,這里我選擇了ATMEL公司的AVR系列單片機Atmega64,該款單片機價格便宜,功能強大,能滿足上面幾點的全部要求。
結論:最終選擇的單片機為ATMEL公司的Atmega64八位高性能單片機。
主控系統的核心如圖3.1所示。
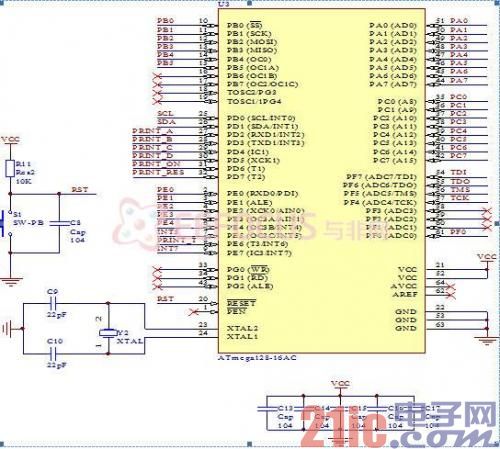
圖3.1 核心板最小系統
3.2 霍爾傳感器
霍爾傳感器是實現行車記錄儀最核心的部件,記錄儀的核心記錄參數(車速),便是由霍爾傳感器實現的,所以在制作霍爾傳感器時必須嚴格把關。
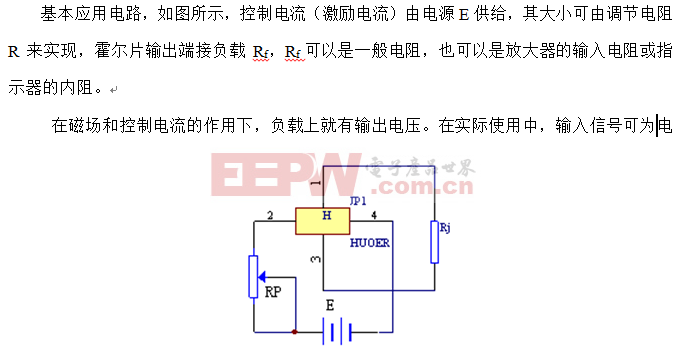
3.2.1霍爾傳感器工作原理
霍爾傳感器,顧名思義,利用的是霍爾效應。
霍爾效應的本質是:固體材料中的載流子在外加磁場中運動時,因為受到洛侖茲力的作用而使軌跡發生偏移,并在材料兩側產生電荷積累,形成垂直于電流方向的電場,最終使載流子受到的洛侖茲力與電場斥力相平衡,從而在兩側建立起一個穩定的電勢差即霍爾電壓。正交電場和電流強度與磁場強度的乘積之比就是霍爾系數。平行電場和電流強度之比就是電阻率。大量的研究揭示:參加材料導電過程的不僅有帶負電的電子,還有帶正電的空穴。
本記錄儀中使用的霍爾元件A3144E正是利用這一效應而產生的。其實物結構圖如圖3.2所示
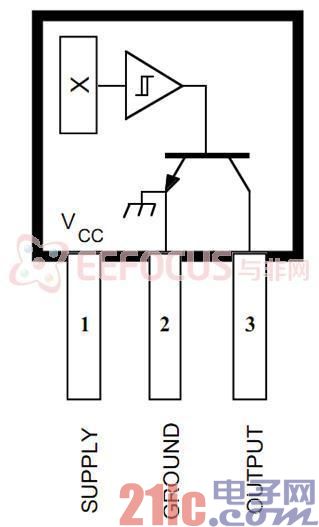
圖3.2 霍爾元件結構圖
霍爾元件工作原理:實物結構圖如上圖3.2所示,3腳為信號腳,1腳和2腳分別接電源和地。在沒有經過磁場時,輸出為高電平,當磁場漸漸變強時,則輸出的電平會漸漸變低,當磁場周期性的出現時,在輸出腳便會出現一個正弦波電壓,霍爾元件信號輸出如圖3.3所示
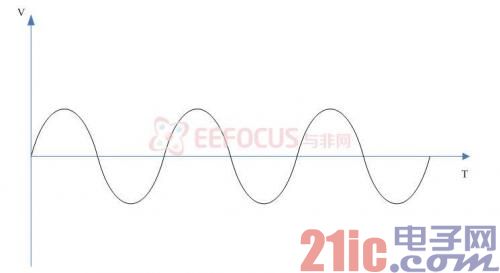
圖3.3 霍爾元件信號輸出
3.2.2 霍爾傳感器改良
如上圖3.3所示在周期性磁場的作用下,霍爾元件,A3144E輸出的是一個周期性的正弦波,而單片機能識別的只是1或0的高低電平,如果把這個信號直接接單片機則有很多缺點:
單片機無法識別該信號除了高電平和低電平時的電平
霍爾元件靈敏度低,只有在磁鐵靠的很近的時候才有反應
針對以上缺點,需要對霍爾傳感器進行改良,目的為了提高靈敏度和改善輸出波形,改良的電路圖如圖3.4所示
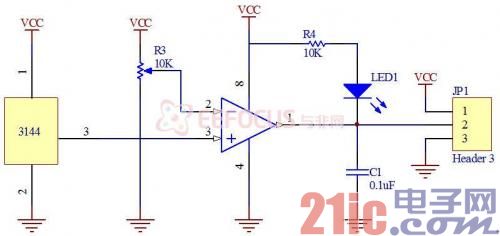
圖3.4 改良的霍爾傳感器
工作原理:改良的霍爾傳感器如上圖3.4所示,在沒有磁場的情況下,3144輸出高電平,則運算放大器輸出低電平,當經過磁場時,3144輸出電平漸漸變低,當電平低于放大器負極時則放大器輸出低電平,從而通過單片機采集這個低電平信號。
由以上工作原理可知,可以通過調節滑動變阻器R3,從而來調節觸發電平。并且通過點亮燈LED1來指示信號的輸出。
改良后的霍爾傳感器信號輸出波形如圖3.5所示
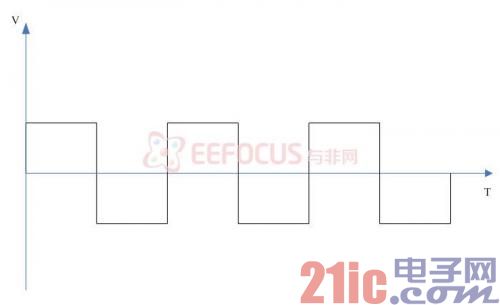
圖3.5 霍爾傳感器輸出信號
霍爾傳感器信號輸出如上圖3.5可知,經過改良后的霍爾傳感器能輸出一個單片機能識別的方波,并且可以通過調節滑動變阻器R3來調節傳感器的觸發電平,同時通過指示燈LED1來指示信號的輸出,最主要達到了增強信號的可處理性的目的。
3.3 打印機
打印機在打印的時候需要大電流提供,而單片機的IO管腳最多只能提供20mA的電流,所以打印機在打印之前需要有額外的驅動電路來提供打印需要的電流。打印機實物接口如下圖3.6所示
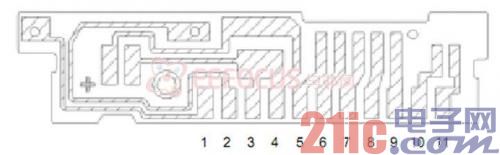
圖3.6 打印機實物接口
其中的信號接口如圖3.7所示
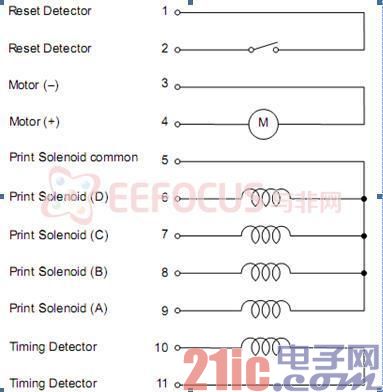
圖 3.7 打印機信號接口
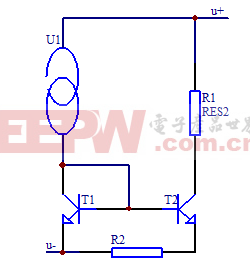
打印機電機驅動如下圖 3.8所示,打印機主要信號包括,電機驅動信號:Motor(+),4個打印針驅動信號:(6,7,8,9)。





評論