PIC32單片機在氣相色譜儀中應用方案,軟硬件協同

3.3.1電磁閥原理及其作用
電磁閥是用電磁控制的工業設備,用在工業控制系統中調整介質的方向、流量、速度和其他的參數。電磁閥有很多種,不同的電磁閥在控制系統的不同位置發揮作用,最常用的是單向閥、安全閥、方向控制閥、速度調節閥等。電磁閥是用電磁效應進行控制,主要的控制方式由三極管、繼電器控制。這樣,電磁閥可以配合不同的電路來實現預期的控制,而控制的精度和靈活性都能夠保證。
電磁閥從原理上分為三大類:直動式、分步直動式和先導式。本設計要控制的電磁閥為直動式電磁閥其原理如圖2-4所示:通電時,電磁線圈產生電磁力把關閉件從閥座上提起,閥門打開;斷電時,電磁力消失,彈簧把關閉件壓在閥座上,閥門關閉。
圖3 單電控直動式電磁閥動作原理圖
1-電磁鐵;2-閥芯
3.3.2模塊設計與實現
本系統需要控制多個電磁閥,作為氣相色譜儀靈敏度,極性,粗條細調等等一系列功能的實現。本模塊的設計如圖2-5所示,通過三極管共射放大電路放大驅動信號,共四路分別驅動四個電磁閥。本設計只需要定時控制電磁閥的開關,三極管驅動已經可以達到系統要求,故不必用繼電器電路來控制。有電磁閥控制部分的電路圖可以看出電磁閥的供電方式為正極為VCC2,但通過流經三極管后負極為GND,故不能形成回路,為了解決這一問題在GND和GND2之間加一個大電流二極管,如圖2-6所示,這樣既能使電磁閥正常工作,又保證了電磁閥工作對單片機系統供電的干擾。
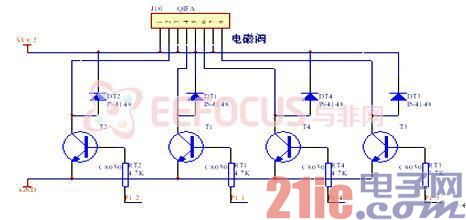
圖4 電磁閥控制電路圖
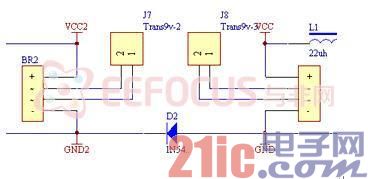
圖5 回路二極管電路圖
3.4電機控制模塊設計
3.4.1直流電機原理及其控制方式
直流電動機的工作原理[8]如下:如圖2-7(a)所示,則有直流電流從電刷 A 流入,經過線圈abcd,從電刷 B 流出,根據電磁力定律,載流導體ab和cd收到電磁力的作用,其方向可由左手定則判定,兩段導體受到的力形成了一個轉矩,使得轉子逆時針轉動。如果轉子轉到如圖2-7(b)所示的位置,電刷 A 和換向片2接觸,電刷 B 和換向片1接觸,直流電流從電刷 A 流入,在線圈中的流動方向是dcba,從電刷 B 流出。此時載流導體ab和cd受到電磁力的作用方向同樣可由左手定則判定,它們產生的轉矩仍然使得轉子逆時針轉動。
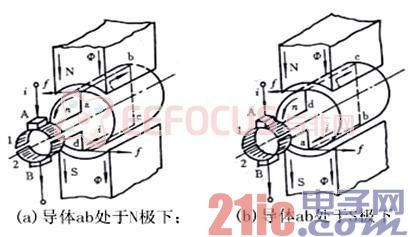
圖6 直流電動機的原理圖
外加的電源是直流的,但由于電刷和換向片的作用,在線圈中流過的電流是交流的,其產生的轉矩的方向卻是不變的。通電線圈在磁場中受力的作用而轉動,在越過平衡位置時換向器改變線圈中電流的方向從而使其能連續的轉動下去。 實際中的直流電動機轉子上的繞組不是由一個線圈構成,而是由多個線圈連接而成,以減少電動機電磁轉矩的波動。
直流電機的控制一般采用繼電器、晶閘管等控制,此處需要控制電機的啟動、停止和正反轉,但控制頻率不高,且不要求調速,故選用繼電器控制。每個電機采用兩個直流12V繼電器分別控制雙相電源,使其啟動、停止和正反轉。
3.4.2模塊設計與實現
在本控制模塊中直流電機用于控制按摩椅后背的前后移動和腿部的上下移動,需要較為平穩的運動,故采用24V直流電機。由于系統不需要調速,只需控制電機的正反轉,故采用繼電器控制電源即可滿足要求。電機正反轉的實現是通過電源反接實現的,所以直流電機的兩根電源線都要有接電源正負的機會,每個電機需要兩個繼電器來控制兩根電源線,只有這樣才能有效地控制電機的正反轉。
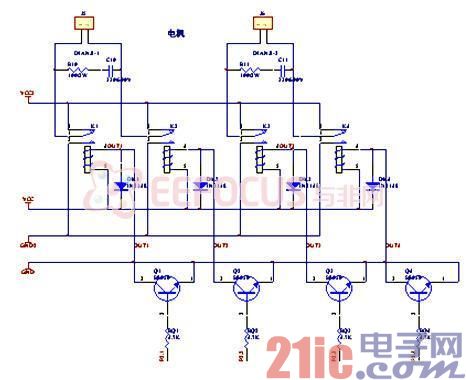
圖7 電機控制電路圖
如圖2-8所示,接通過繼電器K1閉合接通電源,K2斷開接地,電機1正轉,繼電器K1斷開接地,K2閉合接通電源,電機1反轉,其他狀態電機停止;同理,K3、K4控制電機2正轉、反轉和停止。電機控制電路中并聯電容是為了讓電機產生一個啟動力矩,這樣電機通電后能夠確保自動轉起來。另外,直流電機在旋轉時,轉子的電流是經電刷和整流子接觸,供給轉子繞組,在工作時,接觸點有火花,并產生電磁波,并聯電容也可以消除或減小電磁干擾。
3.5其他模塊設計
3.5.1壓力流量傳感器模塊設計模塊設計與實現
兩路流量表模擬信號輸入:流量1:(氮氣/氫氣);流量2:(氮氣/氫氣);
兩路傳感器采用霍尼韋爾AWM3100V,3PIN,工作電壓10V,無氣體輸入時 Output voltage=1.00_+0.5VDC,輸出電壓和輸入氣體流量成線性正比例變化,注意氮氣/氫氣比例不同需要修正,空氣=氮氣=1.0;氫氣=0.7
兩路壓力表(霍尼韋爾26PCF,4PIN,工作電壓10V,可測量壓力范圍0-100psi和輸入氣體流量成線性正比例變化,滿量程是輸出100mv,靈敏度1mv/psi)
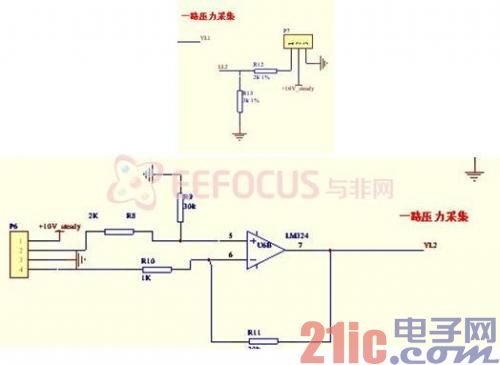
圖8 壓力流量控制電路圖
3.5.2按鍵電路設計
本系統共采用31個按鍵,按鍵較多,故采用掃描芯片節約IO資源,同時在主控板上留有線控器接口,可以在必要時進行功能擴展,可隨時改為矩陣式鍵盤。提高了系統的可擴展性和可升級性。
3.5.3蜂鳴器電路設計
蜂鳴器電路是用來報警或提示用的,蜂鳴器采用5V直流蜂鳴器,采用三極管驅動,控制電路圖如下


評論