MSP430電容觸摸轉輪

摘要
本文引用地址:http://www.104case.com/article/201609/303345.htm本應用文檔介紹了使用MSP430微控制器實現電容觸摸轉輪和多路獨立LED的PWM軟件驅動技術。方案通過4路I/O 端口實現電容觸摸轉輪控制,I/O端口配合三極管驅動LED,實現LED呼吸、軌跡燈等效果。本方案為需要電容觸摸轉輪控制和LED跟蹤顯示等絢麗燈效的產品提供了有效的低成本方案。
簡介
電容觸摸技術作為一種實用、時尚的人機交互方式,已經被廣泛的應用到各種電子產品,小到電燈開關,大到平板電腦、觸摸桌等。隨之而來的是考驗產品設計者如何發揮智慧,在把產品用戶界面設計得方便簡潔的同時,又能呈現產品絢麗的外觀,從而帶來良好的用戶體驗。
LED顯示由于界面友好,可以實時反映觸摸的位置信息,在電容觸摸產品設計中得到廣泛應用。本設計正是利用了大量的LED來實現呼吸燈、軌跡燈的特效,可以為例如燈光、音量、溫度等帶有調節功能的產品提供設計參考。
德州儀器的MSP430系列單片機以低功耗和外設模塊的豐富性而著稱,而針對電容觸摸應用,MSP430的PIN RO電容觸摸檢測方式支持IO口直接連接檢測電極,不需要任何外圍器件,極大的簡化了電路設計,而本設計文檔中使用的MSP430G2XX5更支持多達 32個IO口,可驅動24個以上的LED燈,達到理想的顯示效果。
1.電容觸摸轉輪實現方案
MSP430電容觸摸轉輪方案通過4個IO口完成4個通道的電容檢測,配合特殊的電極圖形,就可實現轉輪的設計。
1.1 電容觸摸實現原理
MSP430根據型號的不同支持多種電容觸摸檢測方式,有RC震蕩、比較器、PIN RO, 本設計使用的是PIN Relaxation Oscillator方式,原理如圖1,芯片管腳內部檢測電路由施密特觸發器、反向器,以及一個電阻組成,震蕩信號經過施密特觸發器變成脈沖信號,再通過反向器反饋回RC電路,通過Timer_A對施密特觸發器的輸出進行記數,再通過設置測量窗口Gate獲得記數的結果。當手指觸摸電極,電極上的C產生變化,導致震蕩頻率改變,這樣在定長的測量窗口就能獲得不同的記數結果,一旦差值超過門限,結合一定的濾波算法判斷就可以觸發觸摸事件。
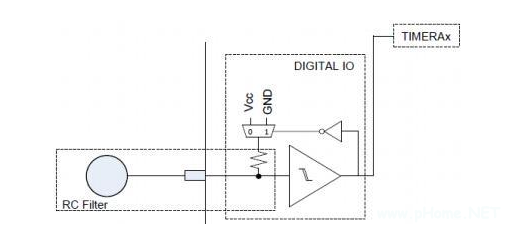
圖1 PIN RO原理圖
1.2 轉輪算法
將4個按鍵電極按照圖2鋸齒狀交叉就形成了一個轉輪的電極,轉輪的大小根據產品設計的需要可進行適當的縮放,圖2的圖形設計適合30mm左右直徑的轉輪。

圖2 轉輪電極設計
當用戶在轉輪上操作的時候,在手指對應位置的電極會獲得最高的信號值,手指臨近的通道會有相對高的信號值,離手指最遠的通道檢測到的信號值最小,如圖3所示:

圖3 手指觸摸時不同電極上測量到的信號值
這時可以利用不同通道上信號值的不同計算出手指在轉輪或滑條上的位置。位置計算步驟如下:
a.用排序方法找出4 個電極中信號最大的電極
index = Dominant_Element(groupOfElements, measCnt[0]);
b.將找到的這個電極的信號加上相鄰電極的信號
position = measCnt[index] + measCnt[index+1] + measCnt[index-1];
相加后的結果如果大于門限,就認為有觸摸事件產生,繼續后續的位置計算。 把前后信號相加的原因是手指在操作的過程中有可能處于兩個電極中間,這樣兩個電極上得到的信號都不會很高,需要把信號相加才可以與門限做比較。
c.計算位置坐標時先根據篩選出的index 值得到一個大約的位置,再根據index 的相鄰電極信號強度進行修正,得到最后的坐標值
position = index*(groupOfElements-》points/groupOfElements-》numElements);
position += (groupOfElements-》points/groupOfElements-》numElements)/2;
position += (measCnt[index+1]*(groupOfElements-》points/groupOfElements-》numElements))/100;
position -= (measCnt[index-1]*(groupOfElements-》points/groupOfElements-》numElements))/100;
d.針對index為0或者3的情況代碼需要另外處理,不過計算方法和上述是一致的。
這里轉輪的分辨率,即轉輪一圈分為多少個段是根據points設定的,假設用戶只需要區分24個位置,就可以設points為24,當然也可以設為 64,128,甚至更高,這取決于轉輪的大小,電極圖形的設計以及電極的多少,例如需要類似1024這種高精度,需要增加電極數從4個到8個或者更多。










評論