CAN總線步進(jìn)電機(jī)驅(qū)動(dòng)器

目前,CAN總線步進(jìn)電機(jī)驅(qū)動(dòng)器在當(dāng)代的應(yīng)用可謂是越來(lái)越廣泛,CAN總線步進(jìn)電機(jī)驅(qū)動(dòng)器是值得我們好好學(xué)習(xí)的,現(xiàn)在我們就深入了解CAN總線步進(jìn)電機(jī)驅(qū)動(dòng)器。
本文引用地址:http://www.104case.com/article/201609/303314.htm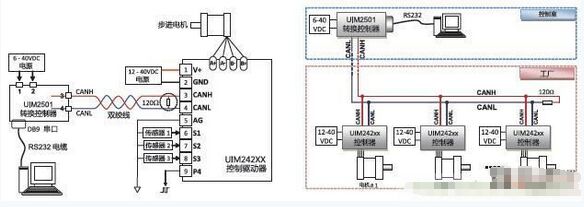
基本內(nèi)容
現(xiàn)場(chǎng)總線是當(dāng)今自動(dòng)化領(lǐng)域技術(shù)發(fā)展熱點(diǎn)之一,被譽(yù)為自動(dòng)化領(lǐng)域計(jì)算機(jī)局域網(wǎng)。它出現(xiàn)為分布式控制系統(tǒng)實(shí)現(xiàn)各節(jié)點(diǎn)之間實(shí)時(shí)、可靠數(shù)據(jù)通信提供了強(qiáng)有力技術(shù)支持。CAN(Controller Area Network)屬于現(xiàn)場(chǎng)總線范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制串行通信網(wǎng)絡(luò)。較之目前許多RS-485基于R線構(gòu)建分布式控制系統(tǒng)而言,基于 CAN總線分布式控制系統(tǒng)在以下方面具有明顯優(yōu)越性:
首先,CAN控制器工作于多主方式,網(wǎng)絡(luò)中各節(jié)點(diǎn)都可根據(jù)總線訪問(wèn)優(yōu)先權(quán)(取決于報(bào)文標(biāo)識(shí)符)采用無(wú)損結(jié)構(gòu)逐位仲裁方式競(jìng)爭(zhēng)向總線發(fā)送數(shù)據(jù),且CAN協(xié)議廢除了站地址編碼,而代之以對(duì)通信數(shù)據(jù)進(jìn)行編碼,這可使不同節(jié)點(diǎn)同時(shí)接收到相同數(shù)據(jù),這些特點(diǎn)使得CAN總線構(gòu)成網(wǎng)絡(luò)各節(jié)點(diǎn)之間數(shù)據(jù)通信實(shí)時(shí)性強(qiáng),并且容易構(gòu)成冗余結(jié)構(gòu),提高系統(tǒng)可靠性和系統(tǒng)靈活性。而利用RS-485只能構(gòu)成主從式結(jié)構(gòu)系統(tǒng),通信方式也只能以主站輪詢方式進(jìn)行,系統(tǒng)實(shí)時(shí)性、可靠性較差;
其次,CAN總線通過(guò)CAN控制器接口芯片82C250兩個(gè)輸出端CANH和CANL與物理總線相連,而CANH端狀態(tài)只能是高電平或懸浮狀態(tài),CANL 端只能是低電平或懸浮狀態(tài)。這就保證不會(huì)出現(xiàn)象在RS-485網(wǎng)絡(luò)中,當(dāng)系統(tǒng)有錯(cuò)誤,出現(xiàn)多節(jié)點(diǎn)同時(shí)向總線發(fā)送數(shù)據(jù)時(shí),導(dǎo)致總線呈現(xiàn)短路,從而損壞某些節(jié)點(diǎn)現(xiàn)象。而且CAN節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重情況下具有自動(dòng)關(guān)閉輸出功能,以使總線上其他節(jié)點(diǎn)操作不受影響,從而保證不會(huì)出現(xiàn)象在網(wǎng)絡(luò)中,因個(gè)別節(jié)點(diǎn)出現(xiàn)問(wèn)題,使得總線處于“死鎖”狀態(tài)。
而且,CAN具有完善通信協(xié)議可由CAN控制器芯片及其接口芯片來(lái)實(shí)現(xiàn),從而大大降低系統(tǒng)開發(fā)難度,縮短了開發(fā)周期,這些是只僅僅有電氣協(xié)議RS-485 所無(wú)法比擬。另外,與其它現(xiàn)場(chǎng)總線比較而言,CAN總線是具有通信速率高、容易實(shí)現(xiàn)、且性價(jià)比高等諸多特點(diǎn)一種已形成國(guó)際標(biāo)準(zhǔn)現(xiàn)場(chǎng)總線。這些也是目前
CAN總線應(yīng)用于眾多領(lǐng)域,具有強(qiáng)勁市場(chǎng)競(jìng)爭(zhēng)力重要原因。硬件電路設(shè)計(jì)CAN 遵循ISO標(biāo)準(zhǔn)模型,分為數(shù)據(jù)鏈路層和物理層。在工程上,這兩層通常由CAN控制器和收發(fā)器實(shí)現(xiàn)。當(dāng)前,市面上有兩種CAN總線器件可供選擇:一種是帶有片上CAN微控制器,如P8XC591/2、87C196CA/CB、MC68376、PowerPC555等,使用這種集成器件方便用戶制作印制板,電路圖也更緊湊;另外一種是獨(dú)立CAN控制器,如Philips
SJA1000、Intel公司82526以及MCP2510(具有SPI接口,方便MCU連接)等,
使用獨(dú)立CAN控制器潛在優(yōu)勢(shì)是,系統(tǒng)開發(fā)人員可以根據(jù)所需從眾多種類單片機(jī)中選擇最理想系統(tǒng)設(shè)計(jì)方案。
節(jié)點(diǎn)微控制器選用單片機(jī)80C196KC,CAN接口由獨(dú)立控制器SJA1000和CAN控制器接口芯片82C250組成。SJA1000在軟件上和引腳上都是與它前款PCA82C200獨(dú)立控制器兼容,并增加了許多新功能:標(biāo)準(zhǔn)幀數(shù)據(jù)結(jié)構(gòu)和擴(kuò)展幀數(shù)據(jù)結(jié)構(gòu),并且這兩種幀格作為式都具有單/雙接收過(guò)濾器;64字節(jié)接收FIFO;可讀寫訪問(wèn)錯(cuò)誤計(jì)數(shù)器和錯(cuò)誤限制報(bào)警以及只聽方式等等。
SJA1000有兩種工作模式:Basic
CAN模式和PeliCAN模式,其中PeliCAN模式全面支持CAN2.0B協(xié)議。SJA1000作為微控制器片外擴(kuò)展芯片,其片選引腳CS接在微控制器地址譯碼器上,從而決定了CAN控制器各寄存器地址。SJA1000通過(guò)CAN控制器接口芯片82C250連接在物理總線上。82C250器件提供對(duì)總線差動(dòng)發(fā)送能力和對(duì)CAN控制器差動(dòng)接受能力,完全和“ISO11898”標(biāo)準(zhǔn)兼容。其引腳8允許選擇三種不同工作方式:高速、斜率控制和待機(jī)。在低速和總線長(zhǎng)度較短時(shí),一般采用斜率控制方式,限制上升和下降斜率,降低射頻干擾,斜率可通過(guò)由引腳8至地連接電阻進(jìn)行控制。斜率正比于引腳8上電流輸出。為進(jìn)一步提高系統(tǒng)抗干擾能力,在CAN控制器SJA1000和CAN控制器接口82C250之間加接6N137光電隔離芯片,并采用DC-DC變換器隔離電源。通信信號(hào)傳輸?shù)綄?dǎo)線端點(diǎn)時(shí)會(huì)發(fā)生反射,反射信號(hào)會(huì)干擾正常信號(hào)傳輸,因而總線兩端接有終端電阻R1、R2,以消除反射信號(hào),其阻值約等于傳輸電纜特性阻抗。
軟件設(shè)計(jì)
CAN總線節(jié)點(diǎn)要有效、實(shí)時(shí)地完成通信任務(wù),軟件的設(shè)計(jì)是關(guān)鍵,也是難點(diǎn)。它主要包括節(jié)點(diǎn)初始化程序、報(bào)文發(fā)送程序、報(bào)文接收程序
以及CAN總線出錯(cuò)處理程序等等。CAN控制器芯片SJA1000的內(nèi)部寄存器是以作為微控制器的片外寄存器存在并作用的。微控制器和SJA1000之
間狀態(tài)、控制和命令的交換都是通過(guò)在復(fù)位模式或工作模式下對(duì)這些寄存器的讀寫來(lái)完成的。在初始化CAN內(nèi)部寄存器時(shí)注意使得各節(jié)點(diǎn)的位
速率必須一致,而且接、發(fā)雙方必須同步。報(bào)文的接收主要有兩種方式:中斷和查詢接收方式。為提高通信的實(shí)時(shí)性,文中采用中斷接收方式,而且這樣也可保證接收緩存器不會(huì)出現(xiàn)數(shù)據(jù)溢出現(xiàn)象。SJA1000的Basic
CAN工作模式是與其前一款PCA82C200獨(dú)立控制器相兼容的模式,
而PeliCAN工作模式支持CAN協(xié)議中的更多功能,它的程序設(shè)計(jì)也與之有所不同。下面給出SJA1000工作在模PeliCAN式下的節(jié)點(diǎn)初始化、報(bào)文發(fā)送、報(bào)文接收的196匯編源程序。
INITIALIZE: 初始化子程序
LDB AL, #09H; 初始化模式寄存器進(jìn)入復(fù)位模式
STB AL, MODE; 選擇單濾波方式
LDB AL, #88H; 時(shí)鐘分頻器
STB AL, CDR; 選Peli CAN模式
LDB AL, #00H
STB AL, ACR0; 初始化接收代碼寄存器
LDB AL, #60H
STB AL, ACR1
LDB AL, #00H
STB AL, AMR0; 初始化接屏蔽寄存器
LDB AL, #3FH; 只接收標(biāo)識(shí)符為2,3的報(bào)文
STB AL, AMR1
LDB AL, #8FH
STB AL, IER; 中斷使能寄存器
LDB AL, #01H; 總線定時(shí)寄存器0、1的設(shè)置
STB AL, BTR0;
LDB AL, #1CH; 在16MHz晶振情況下
STB AL, BTR1; 波特率設(shè)置為250
LDB AL, #0AAH
STB AL, OCR; 輸出控制器寄存器設(shè)置











評(píng)論