微機控制/史密斯算法的Simulink描述

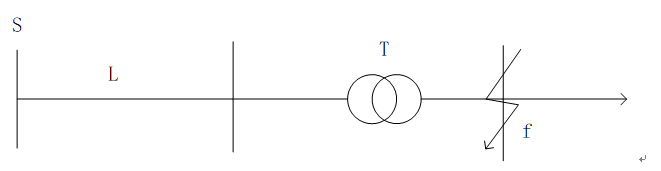
在工業過程控制中,許多被控對象具有純滯后的性質。Smith(史密斯)提出了一種純滯后補償模型,其原理為:與PID控制器并接一補償環節,該補償環節稱為Smith預估器。
本文引用地址:http://www.104case.com/article/201609/297205.htm設被控對象為
采用Smith控制方法,在PI控制中,取Kp=4.0, Ki=0.022,假設預測模型精確,階躍指令信號取100。用MATLAB的Simulink進行仿真,并將PI控制與Smith控制算法進行比較。
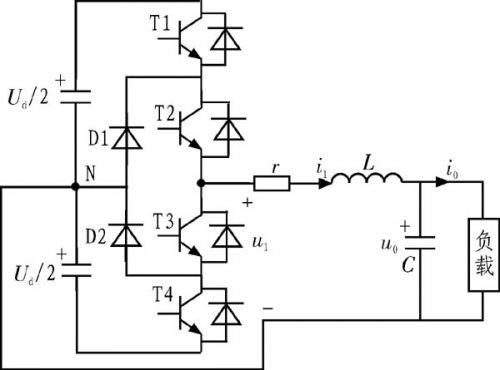
不采用Smith預估控制算法的Simulink程序圖
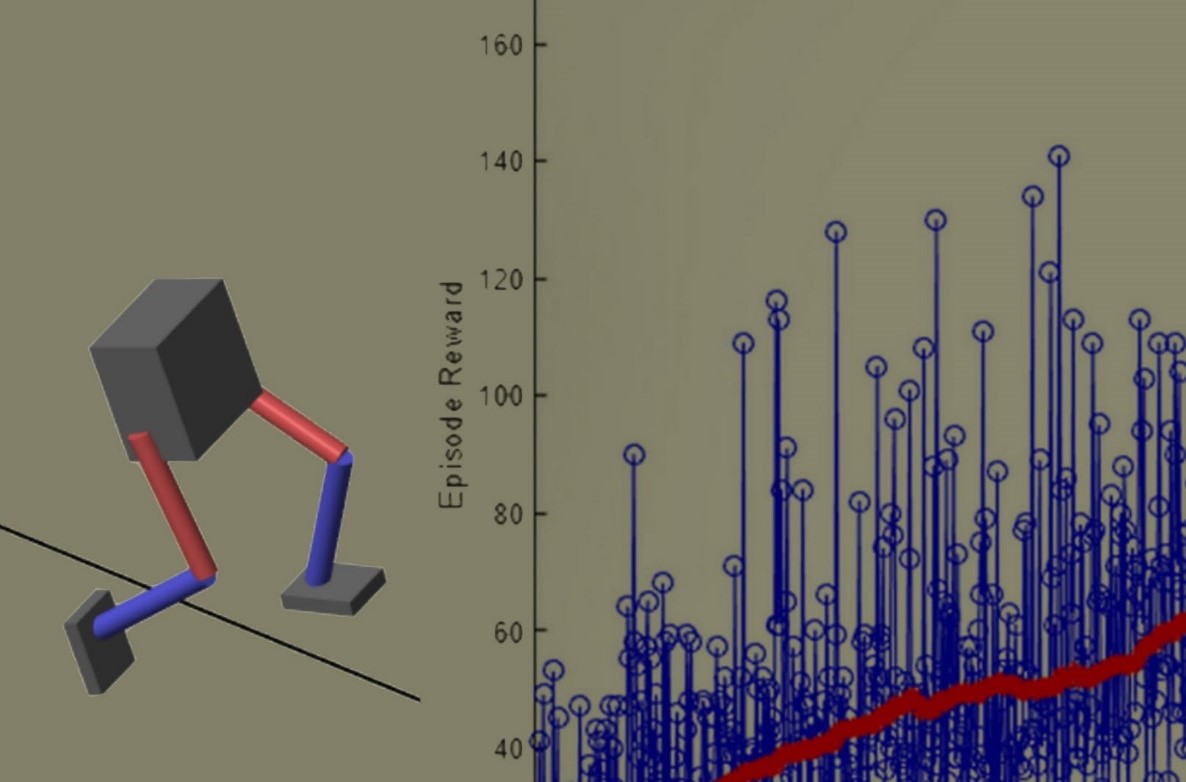
不采用Smith預估控制算法的階躍響應
采用Smith預估控制算法的Simulink程序圖
采用Smith預估控制算法的階躍響應

評論