基于stm32f4的三維旋轉顯示平臺

3.系統軟件設計
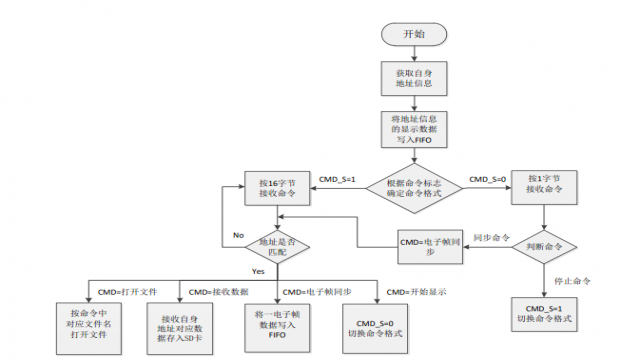
本文引用地址:http://www.104case.com/article/201609/296520.htm3.1軟件控制流程:
3.2關于實時生成體三維顯示數據的討論:
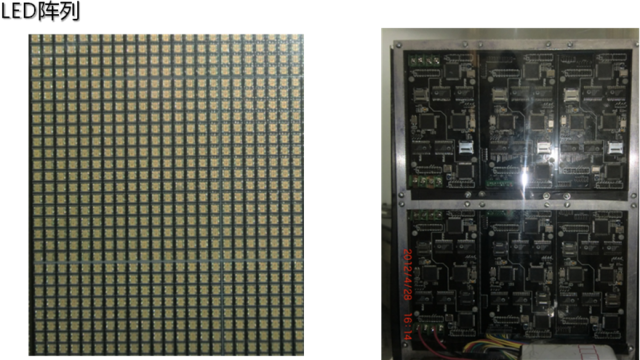
一個瓦片64*32
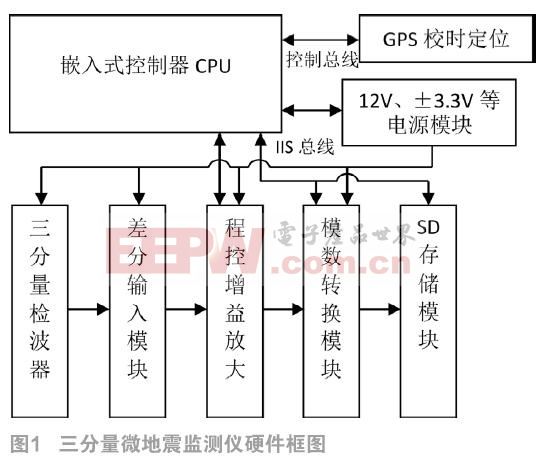
LED層FPGA*8:每個16*16LED
中間層stm32*2:每個4LED層的FPGA,也即32*32
由于經過壓縮,一個led數據為4bits
所以一個stm32每一幀所要生成的數據為32*32*0.5bytes = 512bytes
轉速800轉,一幀1/800s = 1.25ms = 1250000ns
stm32f4主頻168Mhz,指令周期 = 5.93ns
約可執行20萬多條指令
假設fsmc總線的速度為50Mhz,則每幀寫入的時間大概在0.02ms內
程序總體思路
事先算出所有電子幀上非零的點,以及連續0的個數,在每一個電子幀同步后,算出生成下一幀的數據,寫入fifo
輸入:線段端點的集合
//input: endpoints of segments which formed the outline of a 3D model
//x position with range 0-95
//y position with range 0-95
//z position with range 0-128
/******************************************/
//from later discussion, one of the Q format
//type should replace the char type
/******************************************/
struct Coordinate_3D
{
_iq xPosition;
_iq yPosition;
_iq zPosition;
};
//after you get the intersection points in 3d coordinate, you need to remap it into 2d coordinate on the very electrical plane,
//and the conversion is quite simple Coordinate_2D.yPosition = Coordinate_3D.zPosition; Coordinate_2D.xPosition = sqrt(xPosition^2+yPosition^2)
struct Coordinate_2D
{
char xPosition;
char yPosition;
};
struct Line
{
struct Coordinate_3D beginPoint;
struct Coordinate_3D endPoint;
unsigned char color;
};
//frame structure to store the visible points in one electrical frame
//need to be discussed
//here's the prototype of the Frame structure, and basically the frame struture should contain the visible points,
//and the zero points. As we have enclosed the number of zero points after each visible points in their own data structure,
//only the number of zero points at the beginning of the whole frame should be enclosed in the frame struture
struct Frame
{
int zerosBefore;
PointQueue_t visiblePointQueue;
};
//we need a union structure like color plane with bit fields to store the color imformation of every four FPGAs in one data segment
//actually, it's a kind of frustrateing thing that we had to rebind the data into such an odd form.
union ColorPalette
{
struct
{
unsigned char color1 : 4;
unsigned char color2 : 4;
unsigned char color3 : 4;
unsigned char color3 : 4;
}distributedColor;
unsigned short unionColor;
};
//and now we need a complete point structure to sotre all the imformation above
//here we add a weight field = yPosition*96 + xPosition, which will facilitate
//our sort and calculation of the zero points number between each visible point
//it's important to understand that, 4 corresponding points on the LED panel
//will share one visiblepoint data structure.(一塊stm32負責4塊16*16的LED,每塊對應的點的4位顏色信息,拼成16位的數據段)
struct VisiblePoint
{
struct Coordinate_2D coord;
union Colorplane ColorPalette;
int weight;
int zerosAfter;
};
//as now you can see, we need some thing to store the visible points array
typedef struct QueueNode
{
struct VisiblePoint pointData;
struct QueueNode * nextNode;
}QueueNode_t, *QueueNode_ptr;
typedef struct
{
QueueNode_ptr front;
QueueNode_ptr rear;
}PointQueue_t;
//finally, we will have 16*16 words(16 bits)to write into the fifo after each electrial frame sync cmd.
//it may hard for us to decide the frame structure now, let's see how will the work flow of the algorithm be.
//firstly, the overall function will be like this
void Real3DExt(struct Line inputLines[], int lineNumber, struct Frame outputFrames[])
//then we need some real implementation function to calculate the intersection points
//with 0 = no intersection points, 1 = only have one intersection points, 2 = the input line coincides the given electrical plane
//2 need to be treated as an exception
//the range of the degree is 0-359
//it's important to mention that each intersection point we calculate, we need to
//remap its coordinate from a 32*32 field to x,y = 0-15, as each stm32 only have a 32*32
//effective field(those intersection points out of this range belong to other stm32), which can be decided by its address
int InterCal(struct Line inputLine, struct VisiblePoint * outputPoint, int degree)
//so we will need something like this in the Real3DExt function:
for (int j = 0; j < 360; j++)
{
for(int i = 0; i < lineNumber; i++ )
InterCal(struct Line inputLine, struct VisiblePoint outputPoint, int degree);
......
}
/******************************************/
//simple float format version of InterCal
/******************************************/
//calculate formula
//Q = [-1,1,-1];
//P = [1,1,-1];
//V = Q - p = [-2,0,0];
//Theta = pi/6;
//Tmp0 = Q(1)*sin(Theta) - Q(2)*cos(Theta);
//Tmp1 = V(1)*sin(Theta) - V(2)*cos(Theta);
//Result = Q - (Tmp0/Tmp1)*V
float32_t f32_point0[3] = {-1.0f,1.0f,-1.0f};
float32_t f32_point1[3] = {1.0f,1.0f,-1.0f};
float32_t f32_directionVector[3], f32_normalVector[3], f32_theta,
f32_tmp0, f32_tmp1, f32_tmp2, f32_result[3];
arm_sub_f32(f32_point0,f32_point1,f32_directionVector,3);
f32_theta = PI/6.0f;
f32_normalVector[0] = arm_sin_f32(f32_theta);
f32_normalVector[1] = arm_cos_f32(f32_theta);
f32_normalVector[2] = 0.0f;
arm_dot_prod_f32(f32_point0, f32_normalVector, 3, &f32_tmp0);
arm_dot_prod_f32(f32_directionVector, f32_normalVector, 3, &f32_tmp1);
f32_tmp2 = f32_tmp0/f32_tmp1;
arm_scale_f32(f32_normalVector, f32_tmp2, f32_normalVector, 3);
arm_sub_f32(f32_point0, f32_normalVector, f32_result, 3);
//and than we need to decide whether to add a new visible point in the point queue, or to update
//the color field of a given point in the point queue(as 4 visible point share one data structure). from this point, you will find that, it may be
//sensible for you not to diretly insert a new point into the end of point queue but to insert it in order
//when you build the pointqueue. it seems more effective.
void EnPointQueue(PointQueue_t * inputQueue, QueueNode_t inputNode);
//finally we will get an sorted queue at the end of the inner for loop
//than we need to calculate the number of invisible points between these visible points
//and to store it in each frame structure. the main purpose to do so is to offer an quick generation
//of the blank point(color field = 16'b0) between each electrical frame
//the work flow will be like this:
loop
{
dma output of the blank points;
output of the visible points;
}
/******************************************/
//some points need more detailed discussion
/******************************************/
//1.memory allocation strategy
//a quite straight forward method will be establishing a big memnory pool in advance, but the drawback of this method
//is that it's hard for you to decide the size of the memory pool. Another way would be the C runtime library method,
// and you can use build-in function malloc to allocate the memory, but it will be a quite heavy load for the m3 cpu
// as you need dynamic memeory allocation throughout the algorithm.
//2.the choice of Q format of the IQMATH library
//from the discussion above, the range of the coordnate is about 1-100, but the range of sin&cos is only 0-1,so there's a large gap between them.
//may be we can choose iq24?? Simultaneously, another big problem will be the choice between IQMATH and arm dsp library as their q format is
//incompatible with each other. as far as my knowledge is concerned, we should choose IQMATH with m3 without fpu, and cmsis dsp library with m4 with fpu.
//more detail discussion about the range of the algorithm
//x,y range is -64 to 64
//the formula is
//Tmp0 = Q(1)*sin(Theta) - Q(2)*cos(Theta);
//Tmp0 range is -128 to 128
//Tmp1 = V(1)*sin(Theta) - V(2)*cos(Theta);
//Tmp1 range is -128 to 128
//Result = Q - (Tmp1/Tmp2)*V
//because the minimal precision of the coordinate is 1, so if the result of Tmp1/Tmp2 is bigger than 128, the Result will be
//saturated. With the same reson, if (Tmp1/Tmp2)*V >= 128 or <= -127, the result will be saturated
4.系統創新
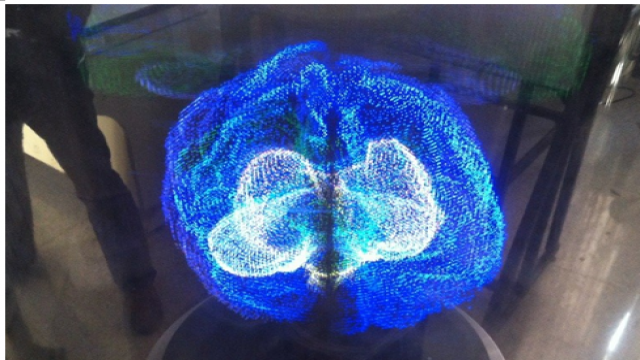
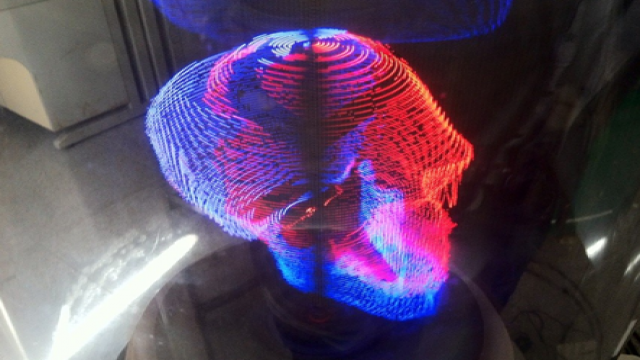
其一,由于高效解析算法的提出,大幅簡化了真三維顯示器顯示數據的獲取難度,只需在PC端獲得當前較為標準化的三維圖形的三角面頂點數據流文件,即可在真三維顯示平臺上顯示出來,使得真三維顯示器的整體顯示流程大為簡化。
其二,由于顯示體的結構分為并行的若干區塊,各個區塊只顯示自身的部分,因此顯示屏幕的擴大并不會造成數據計算量的大幅增加,這就使得本顯示器的擴展性大大增強,可以適用于多種多樣的顯示范圍與領域。
其三,由于高效算法的優化與區塊化顯示的優勢,并行結構的計算量相對較少,這就使得實時控制得以實現,大大增強了真三維顯示器的應用領域。
其四,高效算法與區塊化顯示使得本三維體顯示器不需要如國內外其他同類產品的中所需的高速傳輸方式,因此大大減少了從產品研發到材料再到加工中各個環節的成本。
5.評測與結論
在作品的過程中,我們發現本作品雖然還不是很成熟,也同樣具備較大的應用前景與價值。價格成本的極大降低,使得真三維立體顯示的門檻很低,那么在一些對清晰度要求不高,但是希望多層次全角度呈現三維圖像的應用領域,我們的真三維立體顯示器能發揮較大的作用。
附錄




評論