CAN信號中位定時段的規格

CAN通訊中使用的是同步數據傳輸,CAN控制器在其通訊過程中會不停出現位同步的操作,但不同的數據通訊系統對位同步的要求是不同,為了滿足其要求,我們必須更加深入的來探討另一個概念叫位 定時段的規格。
本文引用地址:http://www.104case.com/article/201609/296392.htm位定時段的規格是根據數據通信系統的需求而確定的。如果要在特定位速率下實現最大的 總線長度或者在給定總線長度的情況下實現最短的等待時間(最大位速率),那么用于重新同步的保留時間( 相位緩沖段)必須保持最小。當時間緩沖段設定為最小值時,表示在一次重新同步當中只能校正|e|=1的相位誤差。因此對位同步的要求非常高,要滿足這樣的要求只能使用精確的石英晶振(石英晶振的誤差通常小于0.1%.)。
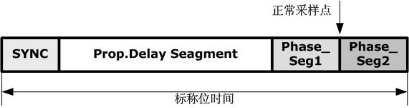
圖 1 位定時段(位速率和總線長度乘積為最大值)的規格
圖 1所示為位定時段(位速率和總線長度乘積為最大值)的規格。這樣的要求主要應用于工業自動化系統。
如果對位速率和總線長度的要求不高,那么位速率和總線長度的乘積也因此降低,而用于重新同步的時間緩沖段則可延長。這樣根據最大可能的同步跳轉寬度,在一次重新同步中可校正|e|=4的相位誤差。因此可以使用較為經濟的陶瓷振蕩器。圖 2所示為適用于 汽車電子中最大振蕩器誤差的位定時規格。

圖 2 位定時段的規格(適用于最大振蕩器誤差)
通常位定時的規格首先通過所需要的位速率來確定。位時間必須為系統時鐘周期的整數倍。位時間tbit=n×tq(n=4..25,tq為時間量)。確定位定時參數的一種方法是首先確定傳輸段的長度,因此必須考慮到最大的總線長度和最大內部延遲時間。將往返的延遲時間轉換成對應時間量的數目并取四舍五入為tq的整數倍。由于同步段的長度為1個tq。那么剩下兩個相位緩沖段的長度為(tbit-tprog_seg-tq)。如果剩余時間單位的個數m=(tbit-tprog_seg-tq)/tq為偶數,則兩個緩沖段的長度相同,如果是奇數,tphase-seq2=tphase_seq1+tq。
還必須注意Phase_Seg2的最小標稱長度。由于該段不能短于CAN控制器的數據處理時間(該時間取決于實現方式的不同,介于0到2 tq之間)。同步跳轉寬度(SJW)設置為它的最大值Min{4, tphase_Seg1/tq}。
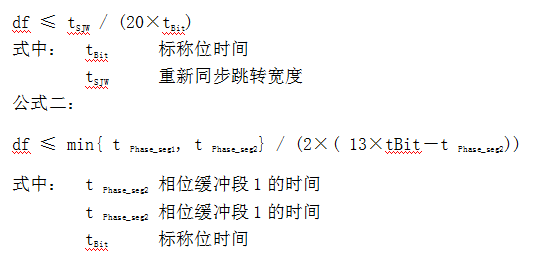
振蕩器的允許誤差根據下方兩條公式進行確定。
公式一:









評論