一種基于AT89C51的腰椎牽引儀的設計

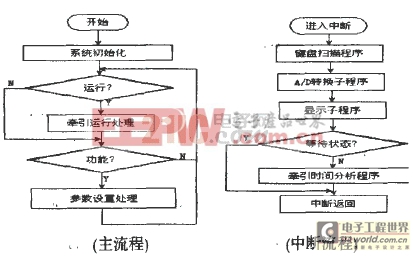
圖6腰椎牽引器系統的程序流程圖
主程序首先初始化,允許開放所有中斷.并打開定時器中斷。主程序隨時等待并響應中斷。在沒有中斷產生的情況下,運行檢測程序,以檢測系統是進人功能設定還是進入牽引電機運行處理狀態。當有定時器中斷產生時,程序跳轉到定時器中斷服務子程序。運行鍵盤掃描,數據采集,顯示以及牽引時間分析子程序。當中斷子程序運行完畢,返回主程序調用處。
3.1主程序設計
軟件主程序是系統的監控程序.主要完成初始化.控制程序的流向.調用子程序等功能。其流程圖見圖6所示。上電復位后,程序開始執行。首先是初始化的工作.包括:
?A/D采樣結果.BCD轉換結果.拉力設定值這些存放單元的初始值設置;
?lO秒發生器計數器,定時開計數器,定時關計數器。總牽引時間計數器以及定時開預值,定時關預值,總牽引時間預值這些單元的初值沒置:
?中斷計數器值的設置,調整它可改變中斷響應時間:
?20H單元中的各個位00H~07H賦0.電機控制端口P1.3置1(指示電機關),17H置1(指示定時關狀態),0DH置l(設置等待燈亮):
?定時器0中斷服務初始化:定時器工作方式以及其初值的設置
其次是檢測位地址00H,判斷電機是否開。如果有(00H=1)則執行電機牽引運行處理程序相應的功能。如果沒有(00H=0)Hq到下一步.檢測位地址01H,判斷鍵盤上的功能鍵是否按下.如果有(O1H=1)則執行程序參數設置處理相應的功能。如果沒有(01H=0)則返回到檢測電機是否開。主程序循環執行。
主程序的流程較為簡單,所需要的完成的功能都是由子程序實現。
4 結論
本文作者的創新點是設計了一種牽引力和牽引時間能精確控制且能實時顯示。牽引過程能自動完成,患者在治療過程中可以自行進行適當調節的腰椎牽引器。由于該系統硬件簡單、成本低、集成度高、穩定性好、調試方便以及抗干擾能力強,并且能實現牽引力的自動控制.因而具有一定的實用價值,但投入實用化仍需改進,為真正促進智能型腰椎牽引器的應用,需要采用新器件以實現電路更加緊湊.改進牽引器的機械結構設計、加強儀器的可靠性等方面采取一定的技術措施,同時增加對牽引力保持階段的牽引力檢測。當出現偏離設定的數值時,能控制牽引系統進行自動補償.這是值得探討的問題。
通過實驗測試系統檢測傳感器、控制執行機構、顯示、報警等各功能正常,性能達到預定設計要求。

評論