基于Haptic技術的盲人輔助路徑誘導服務研制

2.4.3 尋徑模塊
關于尋徑問題,即最短路徑問題,目前所公認的最好的求解方法是1959年由DIJKSTRA E W提出的標號法,即經典的Dijkstra算法,該算法是目前多數系統解決最短路徑問題采用的理論基礎[15]。
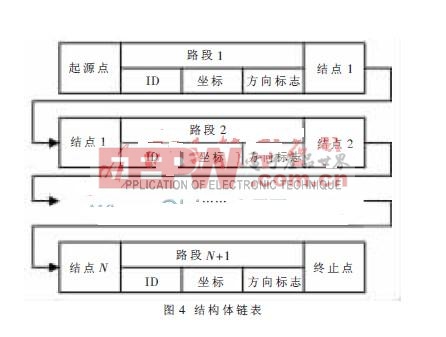
在經典Dijkstra算法的基礎之上,在存儲結構方面對算法作了一定的改進,使用了一些獨特的數據結構,如前趨表和最短路徑結構體鏈表,使算法的性能有了較大的提高,能更有效地求出圖中一個頂點到其他頂點的所有最短路徑。計算最短路徑完畢后,對最短路徑經過的所有路段建立單向結構體鏈表以表示預規劃路徑,如圖4所示[9]。
2.4.4 差異震動提示模塊
鑒于常人的觸覺靈敏度是視覺的近20倍,而盲人具有敏銳于常人的觸覺資源[12]以及震動形式提示具有抗噪聲干擾、反饋及時和高有效性等優點,在開發過程中開創性地提出利用差異性震動作為路徑誘導的主要驅動力。
Android SDK提供了震動API,首先創建Vibrator對象,通過調用vibrate方法設置震動時間的長短、震動事件的周期等來實現差異性震動。主要核心代碼如下:
Vibrator = (Vibrator)getSystemService(Service.VIBRATOR_
SERVICE); //創建Vibrator對象
vibrator.vibrate(new long[]{t1,t2,t3,t4},repeat);
//調用vibrate方法設置震動(以4個參數為例)
在Vibrator構造器中有4個參數,其中t1、t3是等待多長時間啟動震動, t2、t4是震動持續時間, 單位為ms(1 000 ms=1s);repeat用來設置是否重復震動,當repeat=0時,震動會一直持續,若repeat=-1時,震動只會出現一輪。
3 系統測試與討論
為了驗證本路徑誘導新模式的實用性和可靠性,選用小區域地圖數據供系統測試,以大學校園為測試區,并自制了校園的簡單地圖來進行實地路徑誘導測試。
測試環境選在室外較為空曠地帶,當獲取的GPS定位信息滿足路徑誘導定位需求時,運行程序并載入地圖。尋徑模塊根據輸入的起始位置與目的地規劃出一條最適路徑,再根據預設的偏離路徑閾值、震動持續時間和周期,在行走過程中,當不同程度的與規劃路徑偏離或到達路口節點時,能夠以不同形式的震動提示報警,測試者能明顯地感覺到震動的差異性,從而達到測試目的。
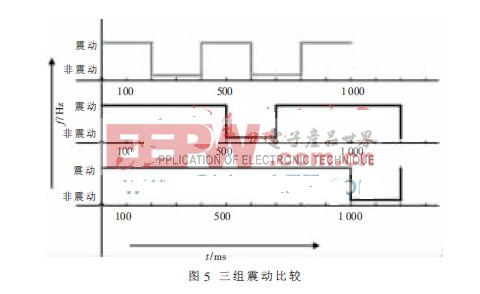
根據設置等待時間、震動持續時間以及是否重復震動的不同來控制震動的差異性。在此設定輕微偏離路徑為短震動,嚴重偏離路徑為長震動,而到達路口節點為一般震動,以此三組為例加以討論說明。(1)短震動4個參數設置為vibrator.vibrate(new long[]{200,200,200,200},0),震動持續時間、等待時間均為200 ms;(2)一般震動4個參數設置為vibrator.vibrate(new long[]{200,500,200,500},0),震動持續時間和等待時間分別為500 ms和200 ms;(3)長震動4個參數設置為vibrator.vibrate(new long[]{200, 1 000,200,1 000},0),震動持續時間為1 000 ms,等待時間為200 ms,這三組震動主要基于震動持續時間區分,具體如圖5所示。根據測試能夠明顯地感覺到震動的差異性,較易區別。后續工作還可以考慮震動頻率大小來設計震動差異性等。
本系統實現了盲人路徑誘導所必須的基本功能,能夠有效地對兩地點間路徑進行最優規劃并提供差異性震動提示,使用戶高效、及時、準確地行走。對于日益成熟的語音導盲來說,當在極其嘈雜的環境中時,語音功效就會大打折扣甚至失去作用,而這種差異性震動路徑誘導新模式的研制則能很好地彌補語音的不足,二者的集成使用將增強盲人路徑誘導服務系統的環境適應性,增大了其市場化的潛力。
參考文獻
[1] 夏岳勇,楊峻.盲人導航儀[J].醫療設備信息,2007,22(1):111-113.
[2] KUC R. Binaural sonic electronic aid provids vibrotactile cues for landmark,reflector motion and surface texture classification[J]. IEEE Trans on Biomedical Engineering,2002,49(10):1173-1180.
[3] RAN L, HELAL S, MOORE S. Drishti: An integrated indoor/outdoor blind navigation system and service[C]. Proceedings of the second IEEE Annual Conference on Pervasive Computing and Communications, Florida ,USA,2004:23-30.
[4] MORI H, KOTANI S, SANEYOSHI K, et al. The matching fund project for practical use of robotic travel aid for the visually impaired[J].Advanced Robotics,2004,18(5):453-472.
[5] 陳美鑾,尹浩,黎飄,等.智能盲人導航儀的設計與實現[J].電子技術應用,2006,32(10):4-6.
[6] 賀菊方,潘國華,何俊峰.用于幫助盲人行走、識別障礙物的電子裝置[P].中國專利,CN2843397.2006-12-06.
[7] 寧志剛,楊保柱,楊玲,等.一種新型盲人導行識別系統的設計[J].電子技術應用,2010, 36(6) :141-143
[8] 何婧,聶F,羅蘭,等.聽覺引導助盲系統[J].生物醫學工程學,2010,27(2):467-470.
[9] 徐珠寶,許勇,楊軍.Windows Mobile平臺下的盲人導航軟件系統開發[J].計算機與現代化,2010(10):116-119.
[10] AMEMIYA T, SUGIYAMA H. Haptic handheld wayfinder with pseudo-attraction force for pedestrians with visual impairments[C]. Proceedings of the 11th International ACM SIGACCESS Conference on Computers and Accessibility, New York,USA,2009.
[11] YAO H Y, GRANT D, CRUZ M. Perceived vibration strength in mobile devices: The effect of weight and frequency[J].Haptics,IEEE Transactions on, 2010,3(1):56-62.





評論