CAN總線在汽車控制系統中的研究與應用

(二)系統實現
目前,汽車計算機控制已經涉及到動力性、經濟性、安全性、可靠性、凈化性和舒適性等諸多方面,具體包括發動機控制,變速器控制、巡行控制,制動控制,照明控制,空調控制,雨刷控制,儀表管理系統等,而且各種控制系統的電控單元(ECU)相互聯系緊密,需要隨時進行實時數據通信,CAN總線作為一種極具應用潛力的控制器局域網總線,近年來在汽車計算機控制系統中得到越來越廣泛的應用,并已成為歐洲汽車制造業主體行業標準,代表著汽車電子控制網絡的主流發展趨勢。
汽車計算機控制系統中的所有這些子控制系統通過CAN,0.線構成一個實時控制系統網絡,各控制單元的指令發出去之后,必須保證在一定時間內得到響應,要不然就有可能發生重大事故,這就要求汽車上的CAN通信網絡有較高的波特率設置和可靠性。而且,汽車在實際運行過程中,眾多節點之間需要進行大量的實時數據交換。若整輛汽車的所有節點都掛在一個CAN網絡上,這么多節點通過一條CAN總線進行通信,信息管理配置稍有不當,就很容易出現總線負荷過大,將導致系統實時響應速度下降,這在實時系統中是不允許的。因此我們在對汽車上各節點的實時性進行了分析之后,根據各節點對實時性的要求,設計了高、低速兩個速率不同的CAN通信網絡。將實時性要求嚴格、可靠性要求高的節點組成高速CAN通信網絡,將其它實時性要求相對較低的節點組成低速CAN通信網絡,并架設網關將這兩個速率不同的CAN通信網絡連接起來,實現全部節點之間的數據共享。整輛汽車的通信網絡拓撲結構如圖1所示。
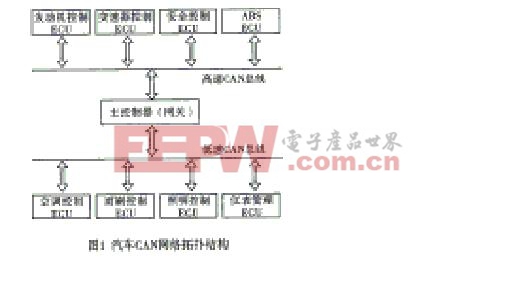
圖1中的發動機控制、變速器控制、安全控制、防抱死制動控制(ABS)等控制單元節點是現代汽車動作的核心部件,對時間響應要求嚴格,因而在本設計中采用傳輸速率為500Kbps的高速CAN通信網絡。空調控制、雨刷控制、照明控制和儀表管理控制等相對來說對實時性的要求較低,采用傳輸速率小于125 Kbps的CAN通信網絡,主控制器跨接高、低速兩條總線,與各節點進行數據交換,兼起網關的作用,實現網絡互連。
電控單元的微控制器(P8xC591 )通過數據總線經過光電隔離器(6N137)與CAN總線控制器(SJA 1000)直接相連,由于CAN總線控制器帶有一個接收緩沖器和一個發送緩沖器,因此,CAN總線控制器的發送端口Tx0,接收端口Rx0、Rx1分別與CAN,總線發送接收器的TxD和RxD, Vref端口直接相連,CAN_L和CAN -H是CAN總線的兩條差分接收發送線。它們的端點間各接一個120Ω的總線匹配電阻,當有節點占用CAN總線時,該節點的發送端(電平為3.5 V)接CAN_H,接收端(電平為1.5V)接CAN_L;當無節點占用CAN總線時,CAN_L和CAN_H上的電平均為2.5V.











評論