基于CAN總線的汽車儀表設計研究

2.2 系統硬件設計
儀表采用Luminarv公司的LM3S2948處理器。這是一款基于ARMCortexM3內核的微處理器,采用32位RISC,內嵌CAN控制器、模數轉換器(ADC)、模擬比較器等功能模塊,減少了外圍電路,降低了系統設計成本。LM3S2948處理器內置CAN模塊方便了CAN總線數據的傳輸,同時使儀表的通信容易實現,提高了可靠性。其內置CAN模塊具有以下特點:支持CAN 2.0B協議并支持符合SAE J1939協議的擴展幀的報文傳輸:位速率可高達l Mb/s;具有32個報文對象,每個對象都具有自己的標識符屏蔽碼;包含可屏蔽中斷,針對時間觸發的CAN(1TrCAN)應用,可選擇禁止自動重發送模式;通過CANOTx和CANORx引腳與外部CAN PHY無縫連接;具有可編程的F1F0模式。
LM3S2948微處理器具有運算速度快、功耗小、體積小、價位低等特點。其CAN控制器模塊特性完全滿足CAN總線汽車儀表的應用要求。該處理器具有強大的處理能力,在車輛的各種工況下都能夠實時反映車輛信息,同時該處理器具有很大的可擴展空間,有利于后續開發。
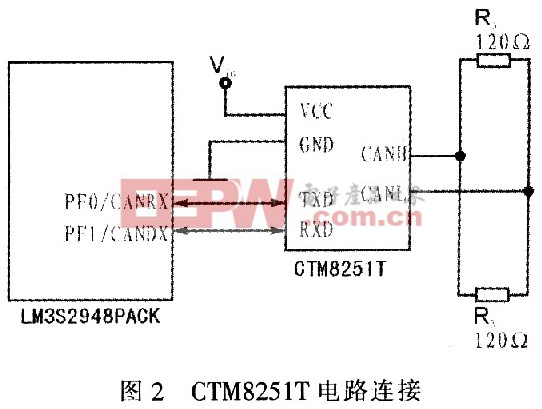
由于LM3S2948內置CAN控制器模塊,所以只需外接一個CAN收發器即可接收總線數據。該儀表選用CTM8251T作為CAN收發器。CTM8251T是一款通用的帶隔離的CAN收發器,該器件內部集成所有必需的CAN隔離及CAN收發器。該器件可連接任何一款CAN協議控制器,實現CAN節點的收發與隔離功能。該器件設計體積小,集成度高,可取代傳統的CAN收發器及其外圍電路,降低了電路的復雜程度,減少了設計成本,如圖2所示。
本文引用地址:http://www.104case.com/article/197593.htm
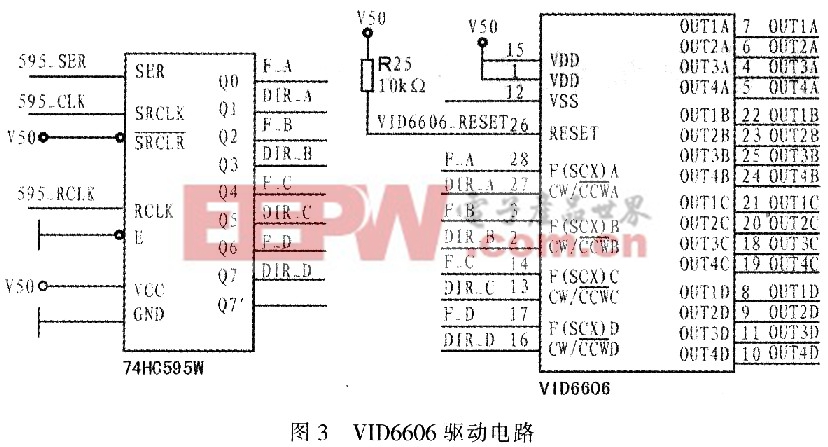
儀表采用VID6606驅動器驅動步進電機。每片VID6606可同時驅動4路步進電機。在其頻率控制端輸入脈沖序列F(SCX),即可控制輸出端使步進電機的輸出軸以微步轉動,每個微步電機輸出軸轉動1/12(°),最大角速度可達600(°)/s。該電機驅動器具有以下特點:硬件微步驅動、簡單易用,電機只需速度F(sex)和方向(CW/CCW)2個控制端、所有輸入引腳都有干擾過濾器、寬工作電壓、低電磁干擾輻射。儀表板指針采用VID-29電機驅動,電機內置減速比180/1的齒輪系,能夠將數字信號直接準確地轉為模擬的顯示輸出。該電機具有很高的顯示精度,其步距角最小可達到1/2(°)。圖3所示為VID6606驅動儀表電路。
該儀表利用LCD顯示時間、燃油消耗量以及產生故障時故障名稱,處理器發送的信號先經74HC245功率放大后,然后送至液晶屏F2000LCD顯示。LCD電路如圖4所示。












評論