基于CAN 總線的信息采集系統設計

1.1 系統硬件設計:
由于TI 公司的TMS320F2812 型DSP 在軍事上已有應用, 且根據各種性能的比較, 本系統采用TMS320F2812 型DSP 作為導航計算機,進行下位機的數據發送,其中eCAN 模塊是TMS320F2812 DSP 片上的增強型CAN 控制器, 其性能較之已有的DSP 內嵌CAN 控制器有較大的提高, 數據傳輸更加靈活方便,數據量更大,可靠性更高,功能更加完備。
上位機采用工控機, 其中由ADLINK 的PCI/cPCI-7841CAN 總線接口卡進行數據接收。該卡可同時操作兩個獨立的CAN 網絡,可編程傳輸速率可高達1 Mb/s,通過直接內存映射能夠快速訪問CAN 控制器,PCI 總線即插即用, 其總線控制器為SJA1000,電氣接口為82C250。
信息采集系統的信息通信利用CAN 總線完成, 其CAN總線接口電路如圖2 所示, 其中獨特之處是在收發器PCA82C250 的輸出引腳CANH 和CANL 之間并聯一個終端電阻R 為120 Ω,解決了遠近端阻抗不匹配的影響。

如圖1 所示,由TMS320F2812 DSP 的eCAN 模塊發送陀螺組合數據及溫度值等, 上位機的PCI/cPCI-7841 型CAN 總線接口卡進行數據接收,從而完成整個信息采集及監測過程。
1.2 系統軟件設計:
系統軟件主要完成基于CAN 總線的數據通信, 并在接收數據之后按要求對采集的導航數據進行處理,轉換成實際所需數據類型,對陀螺組合的狀態進行監測。
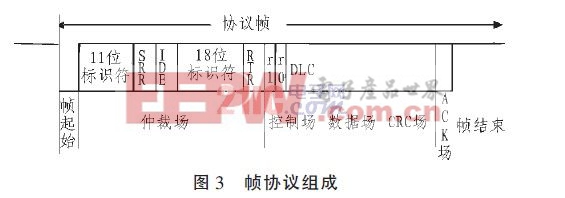
本系統CAN 總線通信報文格式采用CAN2.0B 擴展模式,通信數據格式主要是對CAN 總線協議中的(仲裁場ArbitrationField)和(數據場Data Field)進行定義,要求數據傳輸速率為500 Kb/s。協議幀格式如圖3 所示。
系統的接收軟件設計流程圖如圖4 所示。











評論