基于CAN總線的車用智能傳感器系統設計

4 系統控制原理與實驗結果
系統控制流程如圖4所示
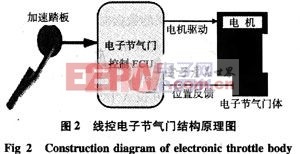 |
控制系統是一個閉環控制的過程,腳踏板位置傳感器作為系統的輸入,A/D轉換后通過CAN總線發送到控制器同樣,節氣門位置傳感器作為反饋信號,A/D轉換后通過CAN總線發送到控制器,兩信號在控制器中進行比較,并由控制器采用相應的控制算法(如PID等)進行決策,決策結果由CAN總線發送到節氣門體位置傳感器和執行器節點,該節點微處理器產生相應的PWM信號經由驅動裝置驅動執行機構的運行
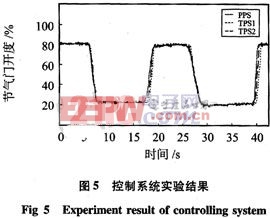
為了驗證控制系統的性能,采用自適應PID控制算法進行了實驗平臺和實車實驗,實驗結果如圖5其中,PPS表示腳踏板位置,TPS1表示實驗平臺下節氣門位置實驗結果,TPS2表示實車情況下節氣門位置實驗結果從控制結果來看,能夠滿足電子節氣門控制的實時性和精度要求,同時,經過實車環境的測試,系統具有一定的抗噪能力
 |
5 結論
CAN總線作為一種可靠的汽車計算機網絡總線已在許多先進汽車上得到應用,將CAN總線應用于智能傳感器中,使傳感器獲得的信號能通過總線實時地、可靠地、高速而準確地進行傳輸,使得各汽車計算機控制單元能夠通過CAN總線共享所有信息和資源,達到簡化布線、減少傳感器數量、避免控制功能重復、提高系統可靠性、降低成本、更好地匹配和協調各個控制系統的目的同時,由于整個智能傳感器網絡采用全數字化的通信,因此,總線也具有很好的抗干擾能力,是未來智能化傳感器和智能化控制網絡的發展趨勢











評論