汽車前照燈CAN總線多路傳輸系統的研究與設計

微處理器89C51負責SJAl000的初始化,通過控制SJAl000實現數據的接收和發送等通信任務。SJAl000的ADO~AD7連接到89C51的P0口,SJAl000的連接到89C51的P2.O,P2.O為0時,CPU片外存儲器地址可選中SJAl000,CPU通過這些地址可對SJAl000執行相應的讀/寫操作。SJAl000的,ALE分別與89C51的引腳相連,接89C51的,89C51也可以通過中斷方式訪問SJAl000。
82C250與CAN總線的接口部分采用了一定的安全和抗干擾措施。82C250的CANH和CANL引腳各自通過一個5 Ω的電阻與CAN總線相連,電阻可起到一定的限流作用,保護82C250免受過流的沖擊。CANH和CANL與地之間并聯了2個30 pF的小電容,可以起到濾除總線上的干擾和一定的防電磁輻射的能力。82C250的Rs腳上接有一個斜率電阻,電阻大小可以根據總線通信速度適當調整,一般在16~140 kΩ。
2.3 微處理器的選擇
汽車電子控制系統的實時性是建立在微處理器的高速運算功能上的,因此微處理器的選擇是系統設計的重要環節,與一般的電子設備相比較,汽車電子控制系統的微處理器特點在于經常處理大量的輸入和輸出信號,而且要實現高精度和實時控制,因此必須能夠同時進行多種獨立的操作。為了滿足這些要求,微處理器必須具有高速計算、高速實時輸入和輸出以及多種中斷響應等特性。由于通用電子計算機電子控制系統的控制功能較為簡單,所以大多數電子控制單元(ECU)中主要使用8 位微處理器。在選擇微.處理器上,不僅要注重滿足技術要求,還要綜合考慮成本和實用因素,不應片面追求微處理器的高速和高位數。
本研究是對按鈕開關的邏輯信號進行處理,對微處理器的控制核心CPU的要求不高,選用AT89C51即可滿足要求。
3 汽車前照燈CAN總線多路傳輸系統的軟件設計
多路傳輸系統的軟件設計包括CAN節點的初始化、CAN報文的發送和接收、PC機與CAN適配卡的通信。
3.1 初始化
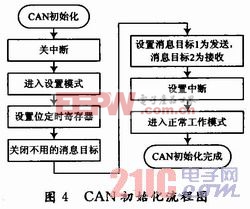
系統節點初始化包括:自檢、CAN通訊初始化、A/D初始化、各種系統標志初始化以及看門狗初始化等。其中89C51的CAN控制器初始化流程如圖4所示。
3.2 CAN子節點收發軟件設計
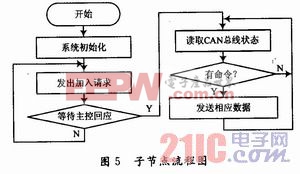
子節點主要功能是實現對按鍵信號進行采集,并響應主控節點命令,通過CAN總線向主控節點發送檢測點信息。在軟件設計上,子節點采取命令一應答方式,即等待命令→分析命令類型→發回相應數據。
系統中子節點在上電復位后主要工作為:
(1)對系統進行初始化;
(2)向主控節點發出加入請求;
(3)主控節點接受請求,并給該子節點一個網絡編號;
(4)等待主控節點命令;
(5)根據命令將監測點的相關數據通過CAN總線發送給主控節點。
因此,子節點的主要流程如圖5所示。





評論