加速度傳感器在汽車防盜系統中的應用研究

1.3 加速度值的確定
加速度傳感器可以分別利用XOUT、YOUT引腳和XFILT、YFILT引腳進行數字信號或模擬信號輸出。
在采用數字信號進行測量時,只要利用微處理器的計數器/定時器端口分別采集信號的工作周期脈寬T1和工作周期的時間長度T2,利用公式(1)就可以得出被測加速度的值。計算公式為:

信號示意圖如圖3所示。

在采用模擬信號進行測量時,可以直接采用從XFILT、YFILT引腳輸出的模擬信號,也可以將XOUT、YOUT引腳輸出的數字信號進行RC濾波,重新恢復成模擬信號。第一種方法輸出的信號帶寬比較寬,但需外加電壓跟隨器才能帶負載;第二種方法可以對輸出的模擬信號進行放大,但頻率響應特性較低。采用何種輸出方式應根據具體的使用條件來確定。
2 采用ADXL202的汽車防盜系統設計方案
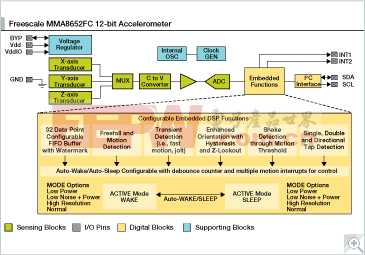
由于竊賊盜竊汽車時會引起車俸的振動或傾斜現象,而ADXL202能夠測量0~5kHz、±2g范圍內動態或靜態加速度。動態加速度的測量可以用于振動檢測;而利用靜態的重力加速度作為輸入矢量,就可以確定物體的空間方向。
2.1整體方案設計
ADXL202采用3V直流電源供電,為降低電源對傳感器的干擾,在引腳VDD和公共接地端COM之間需連接O.1μF的去耦電容。由于芯片與微處理器共用一個供電電源,在電源與VDD間需增加一個100Ω的電阻,以減小數字信號對傳感器輸出信號的干擾。
T2引腳外接625kΩ的RSET電阻,將輸出的數字信號周期確定為5ms,即頻率為200Hz。從XOUT、YOUT引腳輸出的數字信號直接送到微處理器的計數器,定時器端口,以便進行重力加速度的測量,以得出車體傾角的變化。從XEILT、YFILT引腳輸出的模擬信號經電壓跟隨器提高負載能力后,送入微處理器的A/D端口,以對車體微小振動進行測量。
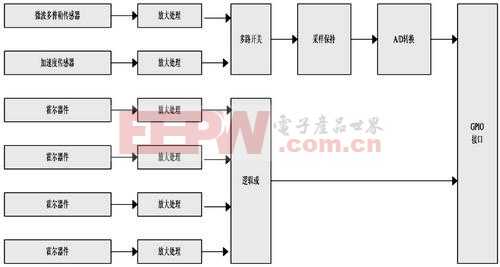
汽車防盜中,車體傾斜角度的測量要求其信號的噪聲必須很小,這就要限制信號帶寬。而對于振動的測量,則需要10~200Hz的較寬信號范圍。首先,將XFILY、YFILT引腳的濾波電容CX、CY設定為0.027μF,這樣輸出的數字、模擬信號的帶寬全都限制在200Hz以下,再將ADXl202輸出的帶寬為200Hz的數字和模擬信號分別經過低通濾波和高通濾波,就可以獲得傾斜、振動監測所需帶寬的信號。將ADXL202同時作為振動測量和傾角測量傳感器的方案原理圖如圖4所示。



評論