汽車防盜GSM報警系統設計

4 加速度傳感器原理和應用
Freescale 新型加速度傳感器的性能分析和應用研究是本設計的一個重點和難點,同時,在本設計的研究工程中總結出了一些基本的規律,對其多種應用方式也進行了初步的嘗試。下面就先簡單介紹一下加速度傳感器的基本特性,接著討論其應用的方式和方法。
(1)加速度傳感器的特性
傳感器的芯片選型:在X 和Y 軸向選用2004 年的Freescale 半導體公司的新品——MMA6260Q 芯片,這是個雙軸向低G 微機電加速度傳感器;在Z 軸向選用MMA 1260D 芯片,這是一款Z 軸向敏感的微機電加速度傳感器。微機電器件是一類有著許多優點的半導體器件,用微機電系統做成的加速度傳感器也有傳統傳感器所沒有的新特性。傳統的加速度傳感器的核心是一個陀螺儀,它是一個精致的但是昂貴的儀器。而Freescale 半導體公司的加速度傳感器是一種表面微機電工藝的集成電路傳感器,這種器件是由一個表面微機電工藝的電容傳感元胞和一個信號調理ASIC 構成的單個集成電路,見圖4,其為加速度傳感器簡化的功能方框圖:
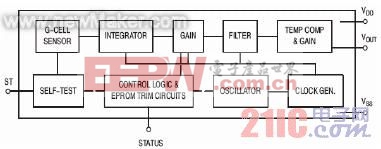
圖4 簡化的加速度傳感器功能模塊框圖
(2)應用方式和方法
本設計的研究工作主要集中在加速度傳感器的算法研究,并取得了階段性的成果。在建立算法和實行實驗驗證的基礎上發現,加速度傳感器的應用可以分成兩大類,其對應著兩大類算法。
加速度傳感器的兩類應用分別為動態加速度的應用和靜態加速度的應用。其中,動態加速度的應用可以是震動、振動、移動、定位信息的檢測和控制;靜態加速度的應用可以是目標傾斜和轉動信息的檢測和控制。本設計的應用主要是靜態加速度的應用。
對應于兩類不同的應用,加速度傳感器的算法可以歸結為兩大類,即靜態加速度補償算法和動態加速度補償算法。前者是針對動態加速度的應用,其目的是要排除靜態加速度,即由重力引起的加速度對檢測結果的影響;后者是針對靜態加速度的應用,其目的則是排除動態加速度的影響。靜態加速度補償算法的實現主要依靠加速度平衡點自校正的方法來實現;而動態加速度補償需要借助于高頻濾波的方法,可以采用模擬低通濾波器或者數字低通濾波器濾除加速度對應的電壓信號中因為運動(包括平動、振動等等)。
5 應用情況和改進設想
如上所述,本設計主要是加速度傳感器的應用。現在就其在本設計中的應用情況作個總結,并提出一點改進設想。
在本設計中實現了加速度傳感器的基本應用,也體現了low-g 加速度傳感器高靈敏度的特點。但是在應用中存在許多不足,仍須改進。為什么會產生這些問題呢?首先,加速度傳感器有一定的感應帶寬和其變化頻率,在設計中采用純軟件,也就是純數字的設計方法處在缺陷。數模轉換的速度有限,使得快變的加速度信號不能被很好的采集、利用。其次,對于連續變化的電壓模擬量做精度有限的數模數轉換必然犧牲模擬量的精度,并且必須考慮數模轉換本身存在的誤差使得加速度的定標變得很困難。
我們在后續的研究工作中會在一下改進。改變原有的純軟件的實現方法,改為軟硬件并用的方法,把原本的純軟件的積分,也就是數字量的累加改成采用模擬積分器的方法,而且改用模擬方法的自矯正,增加模擬低通濾波器。
6 小結
本設計著眼于加速度傳感器的振動、震動、傾斜、提升、移動和玻璃破碎等防范信息的數字信號處理(包括區分、判斷、噪音濾除、形態綜合分析等等)算法的研究,并結合本公司的成熟技術——GSM 短信發送和報警技術,構成新的應用——汽車防盜GSM 報警系統,可望年內向社會推廣。










評論