基于K線/CAN總線的KWP2000協(xié)議分析及協(xié)議棧的開發(fā)

從上面的服務(wù)流程可以看出,基于CAN總線的KWP2000協(xié)議支持多包數(shù)據(jù)傳輸,并且多包數(shù)據(jù)的管理和組織是在網(wǎng)絡(luò)層完成的,應(yīng)用層不必關(guān)心數(shù)據(jù)的打包和解包過程。為實現(xiàn)這一功能,網(wǎng)絡(luò)層定義了四種PDU(以PCI類型進行區(qū)分,如表5所示):
單幀(Single Frame,SF) - 數(shù)據(jù)域及PCI可在一個CAN數(shù)據(jù)幀中容納時,服務(wù)報文以單幀CAN報文進行發(fā)送。
第一幀(First Frame,F(xiàn)F) -數(shù)據(jù)域及PCI不能在一個CAN數(shù)據(jù)幀中容納時,服務(wù)報文以多幀CAN報文進行發(fā)送,其中第一幀(FF)除傳送數(shù)據(jù)外,還包含了多包數(shù)據(jù)的長度信息。
連續(xù)幀(Consecutive Frame,CF) - 多包數(shù)據(jù)中除第一幀外的連續(xù)數(shù)據(jù)幀,除傳送數(shù)據(jù)外,還包含了多包數(shù)據(jù)的包序號。
流控制幀(Flow Control,F(xiàn)C) -用于多包數(shù)據(jù)傳輸過程中的流控制,不包含數(shù)據(jù),只包含流控制狀態(tài)、數(shù)據(jù)塊大小和最小間隔時間等流控制信息。
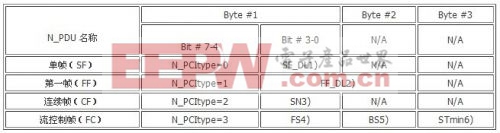
表5 15765協(xié)議網(wǎng)絡(luò)層四種PDU對應(yīng)的PCI格式[7]
1) 單幀數(shù)據(jù)中數(shù)據(jù)域的字節(jié)長度,PCI的長度不包括在內(nèi)。
2) 多包數(shù)據(jù)的數(shù)據(jù)域字節(jié)總長度。
3) 多包數(shù)據(jù)的數(shù)據(jù)包編號。
4) 流控制狀態(tài)信息。
5) 數(shù)據(jù)塊大小。
6) 多包數(shù)據(jù)傳輸?shù)淖钚r間間隔。
多包數(shù)據(jù)的傳輸流程如圖4所示。發(fā)送節(jié)點首先發(fā)送“第一幀”,告知接收節(jié)點將要發(fā)送的數(shù)據(jù)的總長度;接收節(jié)點分配好資源、準備接收數(shù)據(jù),然后以一幀“流控制幀”告知發(fā)送節(jié)點一次可以發(fā)送的數(shù)據(jù)包數(shù)目和時間間隔;發(fā)送節(jié)點接下來就根據(jù)接收節(jié)點的接收能力將編好序號的數(shù)據(jù)包依次發(fā)送過去。
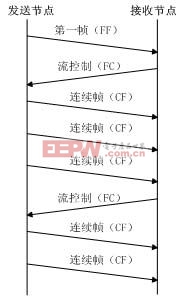
圖4 多包數(shù)據(jù)傳輸流程圖
在數(shù)據(jù)傳送過程中,一個網(wǎng)絡(luò)層PDU被編排成一個CAN數(shù)據(jù)幀,它們之間的對應(yīng)關(guān)系由尋址模式(Addressing mode)決定。基于ISO 15765協(xié)議規(guī)定了四種尋址模式:正常尋址模式(Normal)、正常固定尋址模式(Normal fixed)、擴展尋址模式(Extended)和用于遠程診斷的混合尋址模式(Mixed)。其中,正常固定尋址模式必須采用CAN擴展幀,并且SAE J1939為該尋址模式下的KWP2000診斷服務(wù)保留了兩個專用參數(shù)組編號(PGN):其中PF=218(PF的具體定義請參考SAE J1939數(shù)據(jù)鏈路層協(xié)議)的參數(shù)組用于物理尋址(phy),PF=219的參數(shù)組用于功能尋址(fcn)。正常固定尋址模式的PDU與CAN數(shù)據(jù)幀之間的對應(yīng)關(guān)系如表6所示。

表6 正常固定尋址模式下N_PDU與CAN數(shù)據(jù)幀之間的對應(yīng)關(guān)系[7]
混合尋址模式與正常固定尋址模式類似,唯一的區(qū)別是CAN數(shù)據(jù)域的第一個字節(jié)用于填充遠程地址(RA),N_PCI和診斷服務(wù)數(shù)據(jù)的填充位置向后移動一個字節(jié)。混合尋址模式用于跨越網(wǎng)段進行遠程診斷,遠程診斷的機制如圖5所示。圖中CAN1和CAN2兩個不同的子網(wǎng)通過網(wǎng)橋相連,網(wǎng)橋在子網(wǎng)1中的源地址為200,在子網(wǎng)2中的源地址為10,位于子網(wǎng)1中的診斷設(shè)備(源地址為241)可通過網(wǎng)橋?qū)ψ泳W(wǎng)2中的ECU(源地址為62)進行診斷。

圖5 跨越網(wǎng)段的遠程診斷
4 兩種協(xié)議的簡單比較
從前面基于K線和基于CAN總線的KWP2000協(xié)議可以看出,兩種協(xié)議在物理層、數(shù)據(jù)鏈路層及網(wǎng)絡(luò)層(15765)上存在以下主要差別,這也是K線被CAN總線取而代之的主要原因所在:
K線通訊速率較低,最大波特率僅為10400bps;CAN總線通訊速率較高,最大波特率可達1Mbps。
K線采用單端信號傳輸,抗干擾能力較弱,可靠性較差;CAN總線采用差分信號傳輸,抗干擾能力強,信號傳輸?shù)目煽啃愿摺?p>K線診斷在啟動應(yīng)用層診斷服務(wù)之前必須對ECU進行初始化建立連接,并且初始化過程比較復(fù)雜;而基于CAN總線的診斷設(shè)備不需要對ECU進行初始化即可進行診斷服務(wù)。
K線診斷應(yīng)用程序開發(fā)者必須親自管理數(shù)據(jù)傳輸過程中的字節(jié)間定時,并處理底層通訊錯誤;CAN數(shù)據(jù)幀以整幀報文的形式進行發(fā)送,應(yīng)用程序開發(fā)者不必管理字節(jié)間定時,并且CAN總線物理層和數(shù)據(jù)鏈路層具備完善的錯誤檢測和錯誤恢復(fù)機制,應(yīng)用程序不必監(jiān)視和處理底層通訊錯誤。
K線網(wǎng)絡(luò)結(jié)構(gòu)單一,網(wǎng)絡(luò)管理功能很弱;而利用CAN總線可構(gòu)建復(fù)雜的網(wǎng)絡(luò)結(jié)構(gòu),可跨越網(wǎng)段進行遠程診斷。
K線網(wǎng)絡(luò)采用破壞性的仲裁機制,當診斷設(shè)備采用功能尋址與多個ECU進行通訊時,為避免總線沖突,ECU開發(fā)者必須采取措施保證多個ECU順序訪問總線;而CAN網(wǎng)絡(luò)采用非破壞性的仲裁機制,并且仲裁過程由數(shù)據(jù)鏈路層完成,當診斷設(shè)備采用功能尋址與多個ECU進行通訊時,ECU開發(fā)者不必考慮總線訪問沖突問題。
K線服務(wù)報文最大字節(jié)長度僅為255,無法滿足更長報文的傳輸要求,并且在長報文的傳輸過程中用戶必須自己采取措施進行連接管理,可靠性和兼容性較差;而CAN總線診斷服務(wù)報文最大字節(jié)長度可達4096(12位),對于長報文的傳輸,網(wǎng)絡(luò)層協(xié)議還具備標準化和規(guī)范化的同步控制、順序控制、流控制和錯誤恢復(fù)等功能,具備很高的可靠性、兼容性。
5 KWP2000協(xié)議棧的開發(fā)及測試
從前面的協(xié)議分析可以看出,無論是基于K線還是CAN總線的KWP2000協(xié)議,都是邏輯非常復(fù)雜的系統(tǒng),并且具有嚴格的定時和錯誤處理規(guī)范。如果采用純手工的方式來進行KWP2000協(xié)議棧的開發(fā),不僅要耗費大量的時間和人力,其通用性、完備性、可靠性和可維護性都很難保證。而MATLAB/Simulink/StateFlow不僅具備方便快捷的上層實時仿真環(huán)境,還集成了高效的嵌入式代碼自動生成工具,為協(xié)議棧的開發(fā)和維護提供了強大的支持平臺。此外,由德國Vector公司的CANoe軟件和相關(guān)硬件板卡組成的應(yīng)用開發(fā)平臺,可用于汽車網(wǎng)絡(luò)(CAN,Lin等)的上層協(xié)議開發(fā)和系統(tǒng)測試,該平臺同時支持基于K線和CAN總線的KWP2000診斷協(xié)議,可作為ECU和診斷設(shè)備的測試標準。










評論