長安混合動力汽車核心控制器的開發

1.前言
本文引用地址:http://www.104case.com/article/196850.htm汽車以其便利性極大地改變了人們的生活。隨著生活水平的提高、汽車技術的不斷進步以及汽車工業的迅速發展,汽車的擁有量急劇增加。由此產生的能源消耗、環境惡化等問題與當今世界節約能源、保護環境的大潮流相矛盾。如何在汽車工業的發展和環境的可持續發展中尋求平衡就成為了當今汽車行業面臨的一大課題。混合動力汽車和純電動車就是在這種形勢下慢慢發展起來并壯大的。
整車控制器(HCU)作為整個混合動力系統的主控制器,承擔了整個系統的能量分配、扭矩管理、錯誤診斷等功能。而動力電池作為混合動力汽車和純電動車的主要部件之一,它的管理與控制也是混合動力汽車開發過程中的一項特別關鍵技術。
2.整車控制器的開發
2.1整車控制器(HCU)開發模式
長安混合動力整車控制器(HCU)的開發采用V型開發模式。主要可以分為如下幾個階段:
2.1.1.功能開發階段功能
開發階段主要是用來驗證系統設計方案,在該階段利用matlabsimulink建立簡單的控制策略模型,結合整車模型、發動機模型、電機系統模型、電池系統模型.對整車的油耗、動力性進行仿真。如果在該階段的仿真油耗、動力性沒有達到設計要求,就必須修改系統設計方案,在油耗、動力性等達到目標后,就進入快速原型階段。
2.1.2.快速原型階段
快速原型階段的主要工作就是功能驗證。長安在開發過程中選擇Dspace公司的MicroAutobox作為HCU的硬件載體,利用RTI工具包在功能開發與建立的控制策略模型的基礎上加上適當的輸入輸出接口,然后通過Matlab自帶的real-time workshop將該模型轉換為C語言并且下載到MicroAutobox中。然后在HILI臺架上做測試,在邏輯測試完成后,就將Autobox安裝到車上,進行功能測試。
從快速原型階段中期開始,我們便開始了硬件電路設計、實用軟件設計等。
2.1.3 自動代碼生成
該階段中,首先要做的是將快速原型階段的控制策略加上targetlink接口等,然后利用targetlink將模型轉換為能夠在目標處理器上運行的c語言代碼。
2.1.4 硬件在環仿真
硬件在環仿真(hardware in loop)階段主要是利用dspace公司提供的硬件在環平臺進行半實物仿真,用以驗證HCU軟件的邏輯功能等。
2.1.5 實車驗證階段
在該階段,將通過HIL測試的軟件下載到HCU硬件中,然后再對HCU軟件的功能進行較長時間的測試,軟件功能測試完成后,就進行數據匹配等。
2.2 HCU硬件電路設計
HCU硬件電路板選擇的是一款成熟的發動機控制系統產品,主控芯片為MC9S12XDP512。HCU硬件主要包含以下功能:
數字信號輸入輸出處理單元:主要用于處理數字信號的輸入輸出。
模擬信號輸入處理單元:主要用來處理整車中相關的溫度信號。
頻率信號輸入輸出處理單元:用來處理安全碰撞信號以及電池等相關部件散熱風扇的控制。
CAN通信輸入輸出處理單元:主要用于處理整車各控制器之間的通信。
2.3 HCU軟件設計
HCU軟件中,采用了一個簡單的實時系統來管理各項任務。該實時系統屬于一個非搶占時系統,各任務定時執行。
HCU軟件分為上層軟件、底層軟件、接口軟件三個部分。其中上層軟件由MATLAB\SIMULINK建立的模型轉換而來,所有的控制策略全部由上層軟件實現。底層軟件主要用于信號的接收、發送、診斷,標定協議功能也由底層軟件實現。接口層軟件的主要功能為信號的處理,對EEPROM、FLASH等的讀寫以及故障存儲等。底層軟件與接口層軟件之間的數據交換主要是依靠旗語來實現。
2.4 HCU主要功能
2.4.1 扭矩分配
該功能的主要作用是根據駕駛意圖分配整車中各動力部件的扭矩以及管理動力電池的剩余電量(SOC)。
2.4.2 故障檢測
該功能的主要作用是根據整車各部件通過CAN通信通報給HCU的以及HCU自身判斷的故障來判斷車輛所處的故障等級。
2.4.3下線檢測
該功能主要用于車輛下線過程中的自動檢測,對整車中各混合動力系統相關部件進行詳細的檢查,確保下線車輛的質量。
2.4.4 上下電流程處理
該功能的主要作用是協調各混合動力相關部件的上電與下點流程,包括電機管理系統(IPU)、電池管理系統(BCU)等部件的供電,預充電繼電器、主繼電器的吸合和斷開時間等。
3.電池管理系統的設計
3.1電池管理系統硬件設計
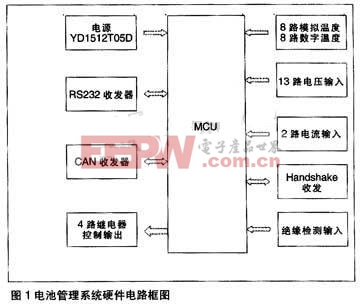
硬件電路分9個模塊:MCU模塊、電源模塊、電流傳感器模塊、電壓傳感器模塊、CAN收發模塊、R232收發模塊、繼電器模塊、HANDSHAKE模塊、絕緣檢測模塊。(如圖1所示)
3.2電池管理系統軟件設計
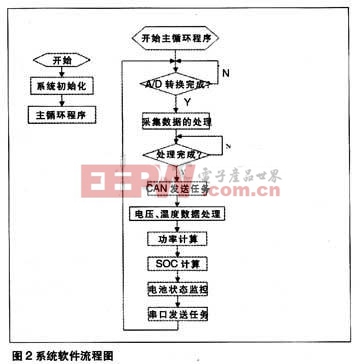
根據控制要求,系統的軟件部分由8個任務組成,包括系統的初始化、采集處理任務、CAN發送任務、SOC的計算、溫度和電壓數據處理、功率估算、電池狀態監控功能和串口發送。除初始化任務外,每個任務的執行周期為10ms,其中,采集處理任務是最基本的任務,其優先權最高。系統采用定時器中斷觸發方式實現了任務執行的周期性。
定時器產生的中斷有下溢中斷和周期中斷兩種。周期中斷被用來觸發任務的執行,中斷周期為10ms。在下溢中斷的服務程序中,包含有電壓采集通道的選擇和查詢方式的CAN接收過程,中斷周期為10ms。除了定時器中斷外,軟件中還設置了串口接收中斷,用來接收上位機發送的信息。
在軟件實現的任務中,初始化任務主要是對DSP中各個模塊的寄存器參數進行配置,包括時鐘倍頻設置、定時器設置、CAN通信各個參數設置以及串口通信設置等。采集處理任務是對A/D轉換結果進行處理,包括對電壓、電流和溫度采樣結果的處理。CAN發送任務是向整車報告電池的狀態信息,根據整車要求,各信息幀的發送周期不同。溫度和電壓數據處理任務中,根據采集值查表,計算其對應溫度,并計算出模塊電壓的最大、最小值。SOC計算和電池組充放電功率的計算構成對電池能量狀態的估算。串口發送任務則是向上位機的顯示界面發送信息,實現電池信息的實時顯示。電池狀態監控功能包含有故障診斷和繼電器的控制功能。
4.結論
混合動力在國內屬于新興技術,而長安的目標是自主掌握關鍵核心技術并具有獨立開發能力。其中,很多技術都是從頭開始,在國內沒有先例,還要建立一套逐漸完善的開發流程。但是長安選擇了迎難而上,充分利用與整合國內外優勢資源,組建了一支優秀的開發團隊,對核心技術進行攻關。最終,長安取得了實質性的成果,成功研發出了國內具有先進水平的混合動力汽車。









評論