基于射頻識別技術的車輛路口

3.2 RTL8019驅動程序的編寫
RTL8019驅動程序做的工作主要是8019的初始化、發送和接收以太網數據包。初始化函數rtl8019_init()是在添加以太網絡接口時由netif_add()函數調用,調用過程中首先初始化此接口對應的全局網絡接口結構體,然后設置8019的各功能寄存器。初始化完8019之后調用arp_init()函數啟動ARP功能,然后用sys_timeout()函數啟動ARP緩沖列表生命周期的定時器。數據包的發送首先從ARP緩沖隊列中查找目的MAC地址,然后構造以太網數據幀的頭部,最后調用底層的發送函數low_level_output()將數據幀發送出去。如果找不到對應的IP/MAC項,發送ARP請求數據幀。數據包的接收由中斷[7]處理函數rtl8019_ISR()調用,它的執行過程是先調用最底層的接收函數low_level_input()從8019中接收數據幀,如果接收的是IP數據包,則更新ARP緩沖隊列并把數據包傳給網絡接口結構指定的函數進行處理。如果接收的是ARP數據包,則調用etharp_arp_input()函數處理。最底層的接收發送函數采用的都是8019的遠程DMA工作方式以提高性能[8]。
3.3 軟件框圖
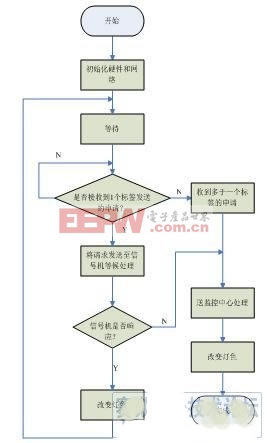
圖4 讀卡器系統軟件框圖
信號機的響應級由監控中心的上位機設定,信號機可以在事先獲得授權的情況下自主改變燈色,如果事先未獲授權,或是同時收到多個不同標簽的請求,則信息必須送到監控中心處理,由監控中心的上位機判定優先級后發指令控制信號機的動作。監控中心還可以隨時獲得特定車輛的位置以及所在區域的路況等信息,通過合理改變區域內信號機的綠信比,達到區域協調控制的目的。
4. 實驗結果
監控中心的上位機軟件由Mircosoft Visual C++.NET 2003開發。

該系統應用于某市政務區的繁華大道與錦繡大道的交口。由于事先設定由監控中心控制,所以當標簽發送通行請求時,讀卡器將向監控中心發送請求,監控中心的上位機彈出圖5所示的對話框,該對話框顯示了車輛所在的路口,車號,車型,車種,請求通行的類型以及請求時間等相關信息,由監控中心決定是否處理其請求,監控中心操作人員可以點擊“忽略”以不響應該車輛本次的申請。

圖6 上位機軟件控制界面
在圖5對話框中點擊“同意受控”后,將會出現圖6所示的設置窗口,左上角的為科學城區域內的主要道路列表,左下角顯示了與道路相應的各交口信號機的當前狀態,未聯機的信號機不顯示。右上角為當前發送申請的車輛所在的繁華大道與錦繡大道交口的示意圖,通過右下角的列表設定當前路口信號機的執行方案。當前的執行方案如列表中所示,該路口信號機當前執行四個相位的方案,每個相位的燈組號如圖示。當前執行的為1號時段方案,對應到本信號機,1號方案表明將一天分為7:00~21:00,22:00~6:00兩個時段,每個時段的相位配時不同。后面的時間即為當前時段每個相位的時間長度。通過改變時間長度可以設定放行的時間。
5. 總結
本系統應用于實際的路口,使得特種車輛的通行更加迅速便捷,同時極大降低了人力消耗。作為智能交通系統的一部分,本系統對實現區域協調控制也具有一定的現實意義。
參考文獻:
[1] 宋廷強,沈劍良,曲英杰. 一種RFID電子標簽的數字部分設計[J].青島科技大學學報,2008,29(1):72-76.
[2] FINKENZELLER K. 射頻識別技術[M].吳曉峰,陳大才,譯.北京:電子工業出版社,2006.36-125.
[3] 李巖,榮盤祥. 基于S3C44B0X嵌入式uClinux系統原理及應用[M].北京:清華大學出版社,2005:69-254.
[4] 陳鼐,于盛林. 基于ARM 的LCD 模塊接口設計及MiniGUI 實現[J].儀器儀表學報,2007,28(Z4):277-281.
[5] 馬連博,蘇衛星,胡琨元,等. 基于嵌入式Linux和RFID技術的電子看板設計[J].計算機應用,2007,27(12):283-285.
[6] 那加. 嵌入式實時操作系統uC/OS-Ⅱ在Sharp LH79520處理器上的移植[J].測控技術,2007,26(10):53-56.
[7] 馮瑋,喻曉峰.基于ARM系統下映像文件的執行與中斷運行機制的實現[J].計算機應用,2006,26(Z1):255—257.
[8] 張蓬鶴,王群,張東輝. RTL8019型控制器與高速數字信號處理器的接口設計及編程技巧[J].國外電子元器件,2006 ,10(8). 47-49.

評論