無人駕駛車輛的自動行駛控制系統設計

輸出設備主要包括顯示屏等,通過顯示屏獲取車輛所在位置和路況信息等。他的主要作用在于根據要求輸出相應的高低電平來提供轉向所需要的電壓。實現原理是通過從標簽獲得數據信息使得系統產生高低電平,同時,系統必須將GPS模塊和GPRS模塊提供的數據通過人機界面顯示在屏幕上使得用戶能夠實時地看到車輛的信息,包括前方路況、車輛位置等。
控制部分是本系統的關鍵,流程圖見圖3。
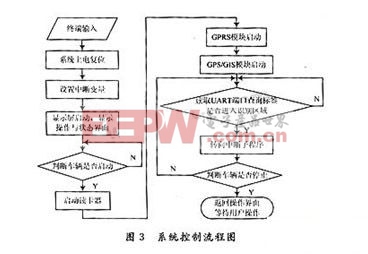
控制部分的流程是這樣的:首先將操作系統下載到目標板,目標板初始化,并且設置各個模塊的中斷向量來保證各個模塊啟動后能夠正確運行。中斷優先級的排序是讀卡器優先級最高,其次是GPRS,最后是GPS。同時,顯示屏顯示操作界面,用戶可以輸入指令使得汽車啟動。當車輛啟動后,各模塊也隨之運行,系統程序將轉入查詢狀態,通過不斷掃描UART端口判斷是否有標簽進入識別區域。若進入標簽識別區域,讀卡器就會接收到射頻模塊識別到的條碼信號,判斷信號正確后,系統轉人中斷子程序。在中斷子程序中,系統會向GPIO端口提供相應的高低電平作為輸出信號來實現轉向。GPRS是隨著車輛啟動后就立即啟動的,這是因為他必須不斷更新監控中心提供的路徑信息來保證車輛的正常行駛。當車輛停止時會發出電平信號,此時,系統轉入等待狀態,屏幕顯示操作界面,等待用戶進行下一步操作。
4 結 語
本方案經過測試仿真表明,自主轉向懸掛式獨軌車載在距離標簽10 m內能夠以915 MHz的頻率通過射頻模塊識別到前方軌道信息,而且能以115.2 kB/s的波特率與GPRS連接,然后接入GPRS網絡與遠端網絡監控站實時通信,進行數據交換。同時,系統能夠作出判斷,發出控制信號。根據測試,該系統穩定性高,實時性強,如果能應用到實際中,使用戶和工作站能夠了解車輛的工作狀態,對減少交通事故有很大的意義。







評論