基于可變計數門限的車檢器設計

隨著道路行車速度的提升及行車數量的劇增,要求車檢器必須具有快速的響應時間、準確的判斷能力和穩定的工作狀態。車檢器檢測技術主要有:視頻[1]、環形線圈[2]、數字微波[2]、激光和紅外線等。雖然檢測技術種類多,但也存在許多不足:一方面是抗干擾能力較差,產品成本也比較高;另一方面則是檢測響應時間較長,難以及時準確地檢測到高速通過的車輛。
針對常規公路的道路環境及車輛通行情況,本文介紹的車檢器采用的是環形線圈檢測技術。該技術原理簡單、實現成本低、工作穩定可靠。在信號分析處理方面,采用了性能穩定的ATmega16A單片機[3]。車輛檢測信號直接由單片機綜合分析處理,每個通道檢測響應時間控制在2.5 ms內完成,檢測結果通過車檢器前面板上的指示燈指示,并且采用RS485總線向上位機或其他監控設備發送檢測結果數據包。
1 系統工作原理
1.1 環形線圈檢測原理
埋在路面下的環形線圈通過饋線連接到車檢器上,與車檢器上的電容及三極管等器件構成LC諧振電路,所產生的正弦波振蕩信號整理成方波信號后送到單片機。在無車輛通過時,可認為由環形線圈所形成的電感值是穩定不變的,因此LC諧振電路的諧振頻率也不變,單片機將接收到固定頻率的方波,記為F1。在有行車通過埋地環形線圈時,由于機動車是一個大金屬體,埋地線圈產生的電感量將發生變化,使得LC諧振電路的頻率也隨之變化,單片機接收到的方波頻率記為F1+ΔF;而當機動車離開埋地線圈后,LC諧振頻率將恢復為F1,從而實現了將車輛通過的有無,轉換為發送到單片機的方波頻率的變化。
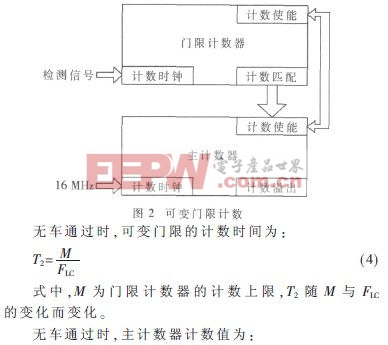
1.2 可變計數門限工作原理
對于采用固定門限的計數方式[4],是給主計數器一個固定時長的計數時間,以檢測信號作為計數時鐘,如圖1所示。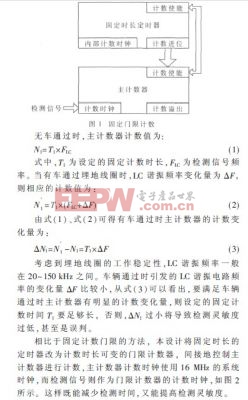


2 系統功能及其硬件組成
2.1 系統功能簡介
(1)本設計采用可變計數門限檢測法。單片機初始化時將根據主計數器的計數值N實現自動調節可變門限計數器的計數上限值M,使得其計數時長在要求之內,而主計數器也能得到具有明顯區分度的計數值。實際上,就是在檢測時間和檢測靈敏度之間達到一個平衡。
(2)車檢器提供了兩個檢測通道,每個通道可以單獨使用,也可以聯合使用。單獨使用時可檢測車流量,即當檢測到車輛通過環形線圈時則累加過車數量;聯合使用時可檢測車速,當車輛經過第一個線圈時記錄車輛進入時間T1,進入第二個線圈時記錄進入時間T2,則行車速度為V=S/(T2-T1),其中S為兩個線圈的間隔距離。
(3)車檢器具備上位機遠程操控功能。上位機通過RS485總線實現遠程操控車檢器的工作模式及設定檢測參數(包括檢測靈敏度、自調諧、通信波特率、初始化、通道開啟狀況等)。輸入輸出數據格式可根據用戶的要求進行組幀,提高了車檢器的適用性。
(4)參數設置及工作狀態指示。采用兩個8 bit撥碼開關用于參數設置,其中一個在前面板上提供通道的檢測靈敏度和存在時間設定,另一個在車檢器電路板上提供地址碼設定、節能模式、串口使能、自調諧等功能的設定。8個LED用于在前面板指示車檢器工作狀態(包括存在指示、故障指示、通信指示、電源指示和編程指示等)。


評論